Yeonjae Lee (Undergraduate Student)
 |
Undergraduate Student (B.S), Embedded System-on-Chip Integrator |
Repository Commit History
 |
Introduction
Full Bio Sketch
Mr.Lee is currently doing his undergraduate degree in Electronics Engineering at Kyungpook National University, Daegu, Republic of Korea. His research focuses on control techniques for minimizing delay in autonomous driving systems, and on filtering methods for reducing sensor noise and improving signal reliability.
Research Topic
PID control for Delay Compensation in Low Pass Filtered Feedback System
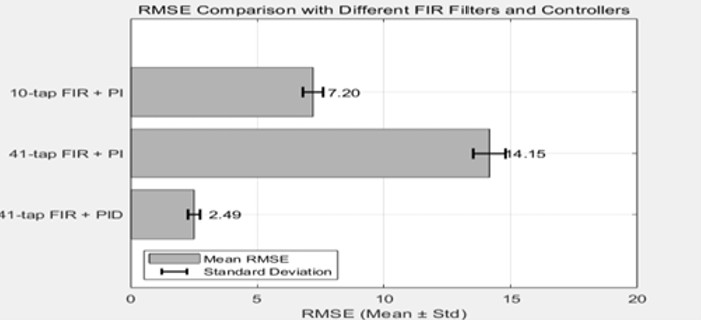 PI controllers are widely preferred due to their simplicity and ease of implementation, whether in analog or digital systems. However, when high-order filters are used to remove sensor noise, the resulting group delay can significantly affect control performance?even in simple first-order plant models. My research shows that incorporating a derivative term (D-control) effectively compensates for this delay, enabling more responsive and stable control in embedded motor systems.
PI controllers are widely preferred due to their simplicity and ease of implementation, whether in analog or digital systems. However, when high-order filters are used to remove sensor noise, the resulting group delay can significantly affect control performance?even in simple first-order plant models. My research shows that incorporating a derivative term (D-control) effectively compensates for this delay, enabling more responsive and stable control in embedded motor systems.
Lightweighted CNN Model for Autonomous Driving Systems
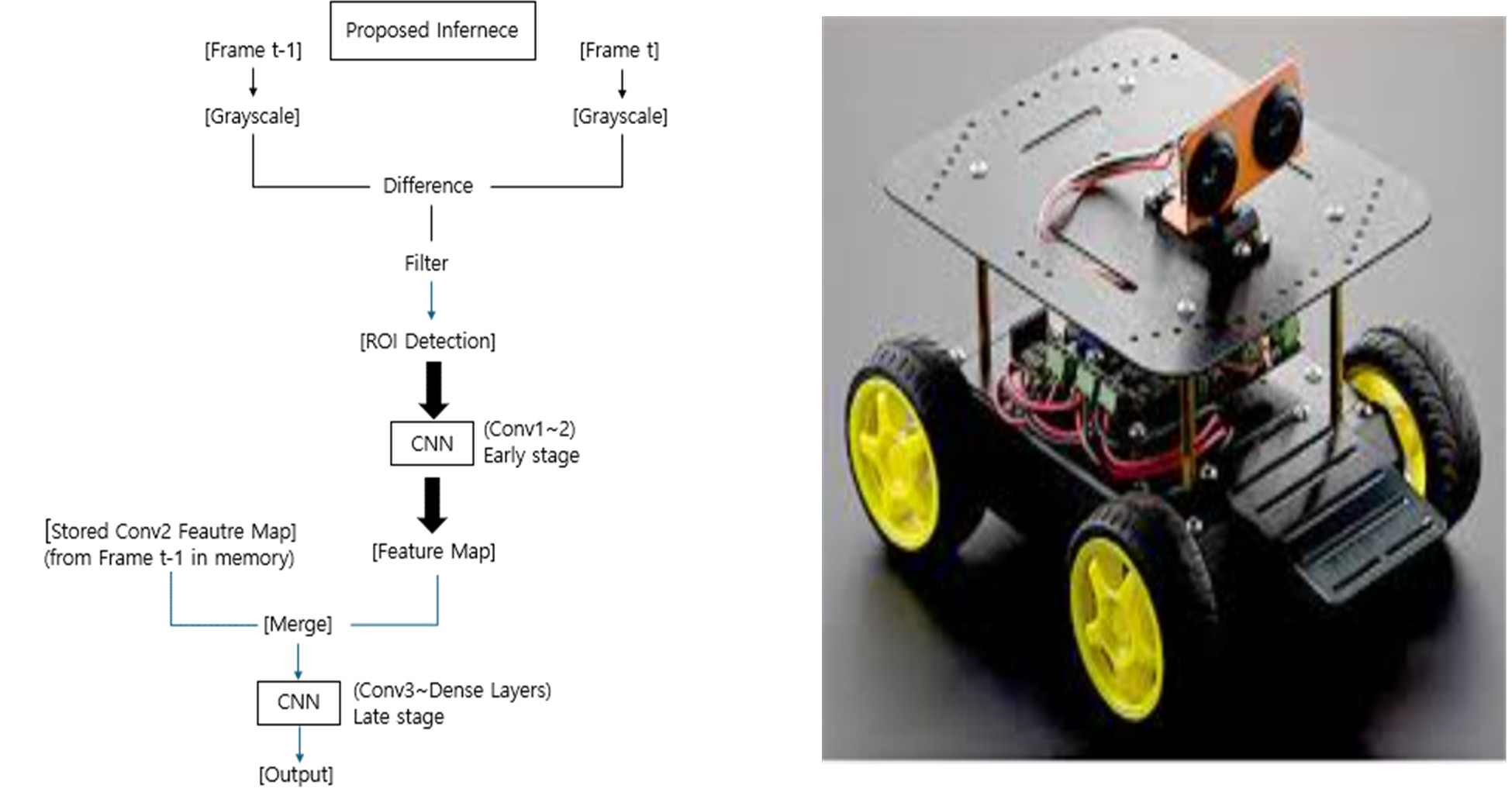 In autonomous driving systems, Convolutional Neural Networks (CNN) are widely employed for perception and decision-making. However, conventional inference executes heavy CNN computations on every input frame, leading to redundant operations and inefficiency in embedded environments. ROI-CNN methods attempt to address this by focusing only on changed regions, but they often suffer from noise sensitivity, boundary instability, and information loss. To overcome these limitations, we propose a memory-based ROI-CNN inference method that reuses intermediate feature maps from previous frames and selectively updates only the regions of change. The approach integrates filtering techniques-such as median blur, morphological operations, and contour-based bounding box extraction. Experimental results demonstrate that the proposed method reduces computational cost by approximately 29.7%, while slightly lowering RMSE, thereby balancing accuracy and efficiency. This research contributes an effective and reliable deep learning inference scheme for resource-constrained embedded platforms and autonomous vehicles.
In autonomous driving systems, Convolutional Neural Networks (CNN) are widely employed for perception and decision-making. However, conventional inference executes heavy CNN computations on every input frame, leading to redundant operations and inefficiency in embedded environments. ROI-CNN methods attempt to address this by focusing only on changed regions, but they often suffer from noise sensitivity, boundary instability, and information loss. To overcome these limitations, we propose a memory-based ROI-CNN inference method that reuses intermediate feature maps from previous frames and selectively updates only the regions of change. The approach integrates filtering techniques-such as median blur, morphological operations, and contour-based bounding box extraction. Experimental results demonstrate that the proposed method reduces computational cost by approximately 29.7%, while slightly lowering RMSE, thereby balancing accuracy and efficiency. This research contributes an effective and reliable deep learning inference scheme for resource-constrained embedded platforms and autonomous vehicles.
Publications
Journal Publications (KCI 1)
Yeongjae Lee and Daejin Park. Feature Map Memory Reuse-Based ROI-CNN Inference with Consecutive Frame Change Detection (KCI) Journal of the Korea Institute of Information and Communication Engineering, 2025.
Conference Publications (Intl. 1)
Yeongjae Lee and Daejin Park. Efficient Runtime Selective Collaboration of PI, PID, Filers for Reative Low-Delay Control In IEEE Global Conference on Consumer Electronics (GCCE), 2025.
Participation in International Conference
IEEE GCCE 2025, Osaka, Japan
Last Updated, 2025.10.28