AI-S2oC Lab
Research
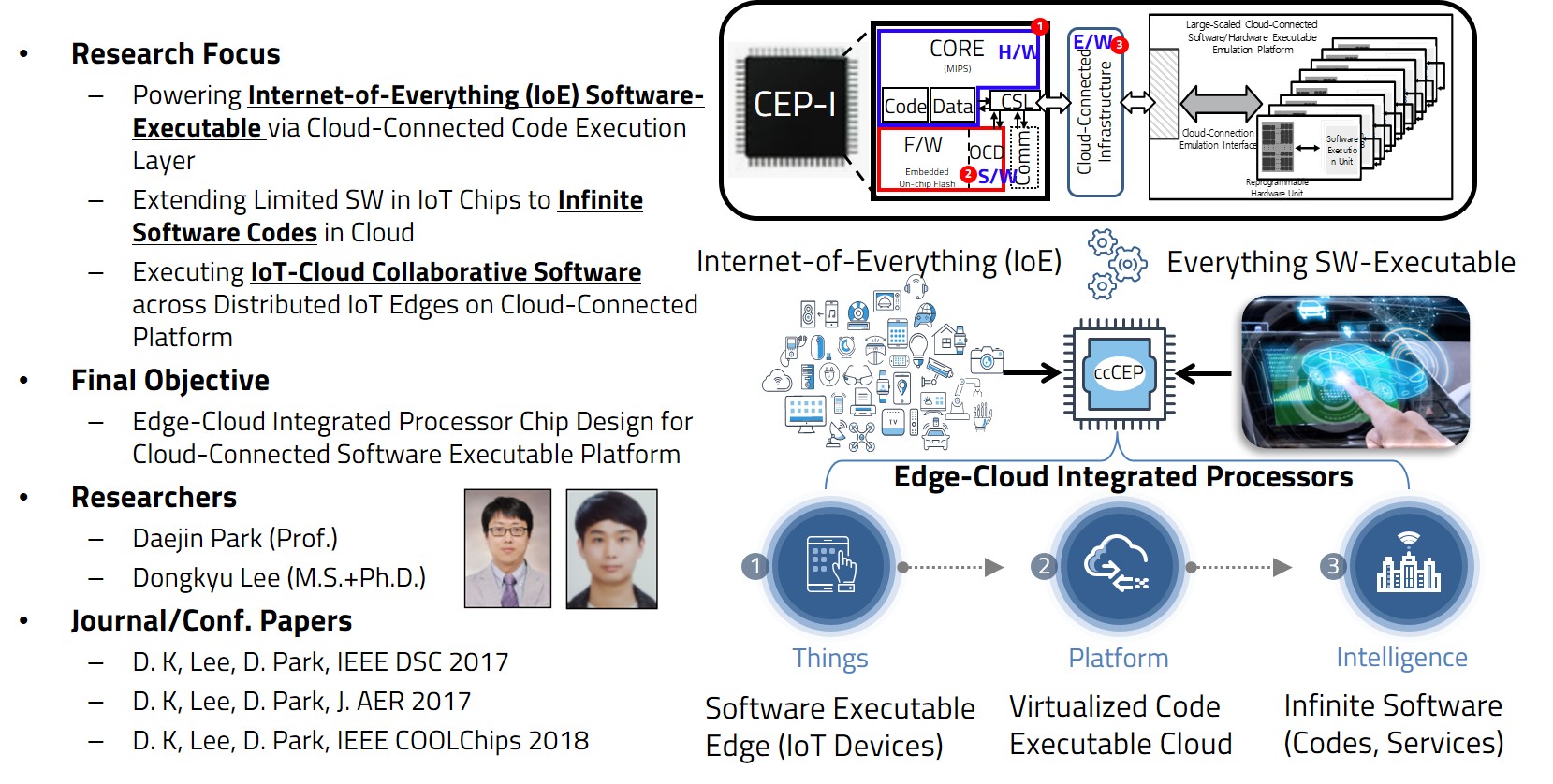
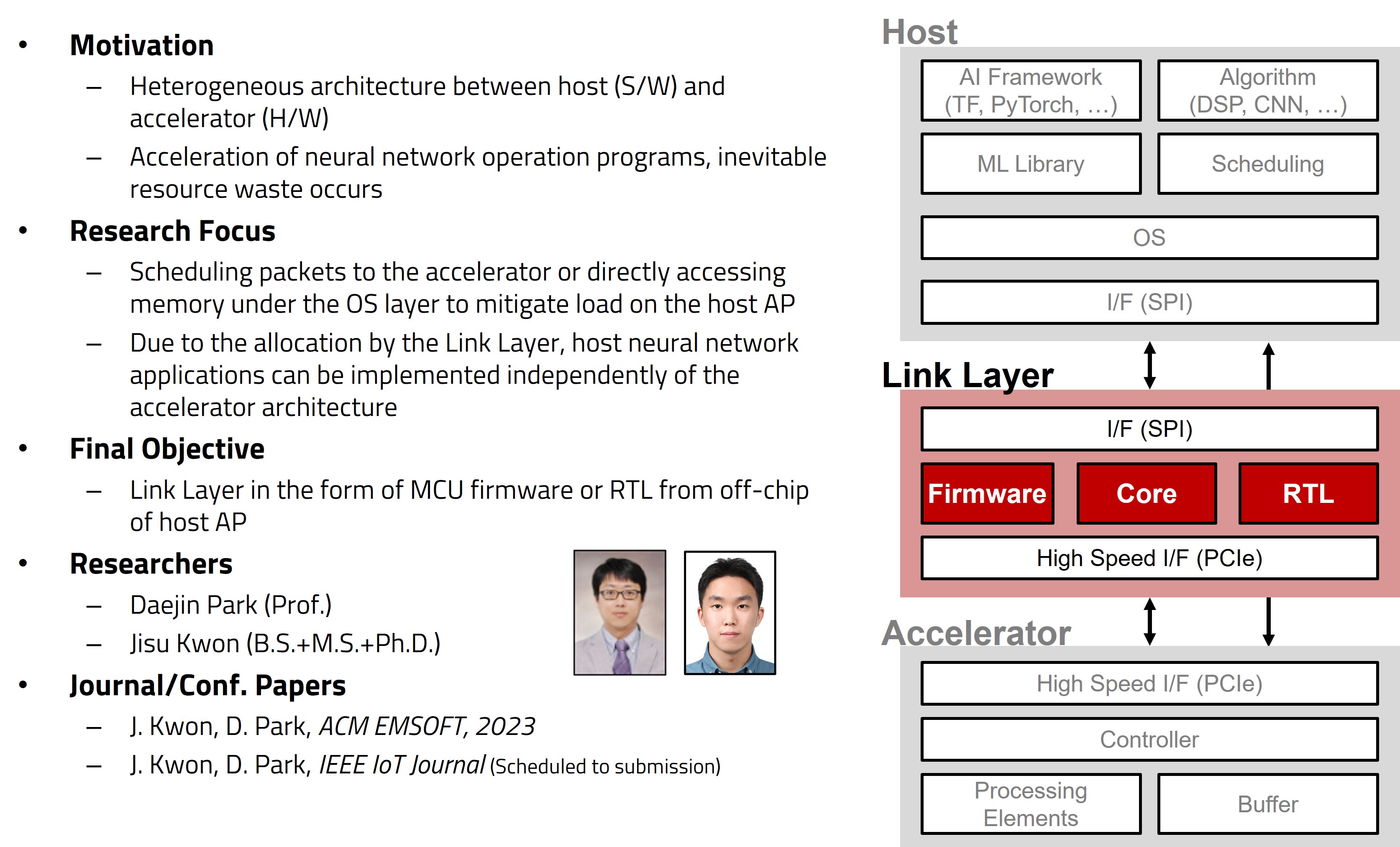
Cloud-Connected Code Executable Processors (ccCEP)
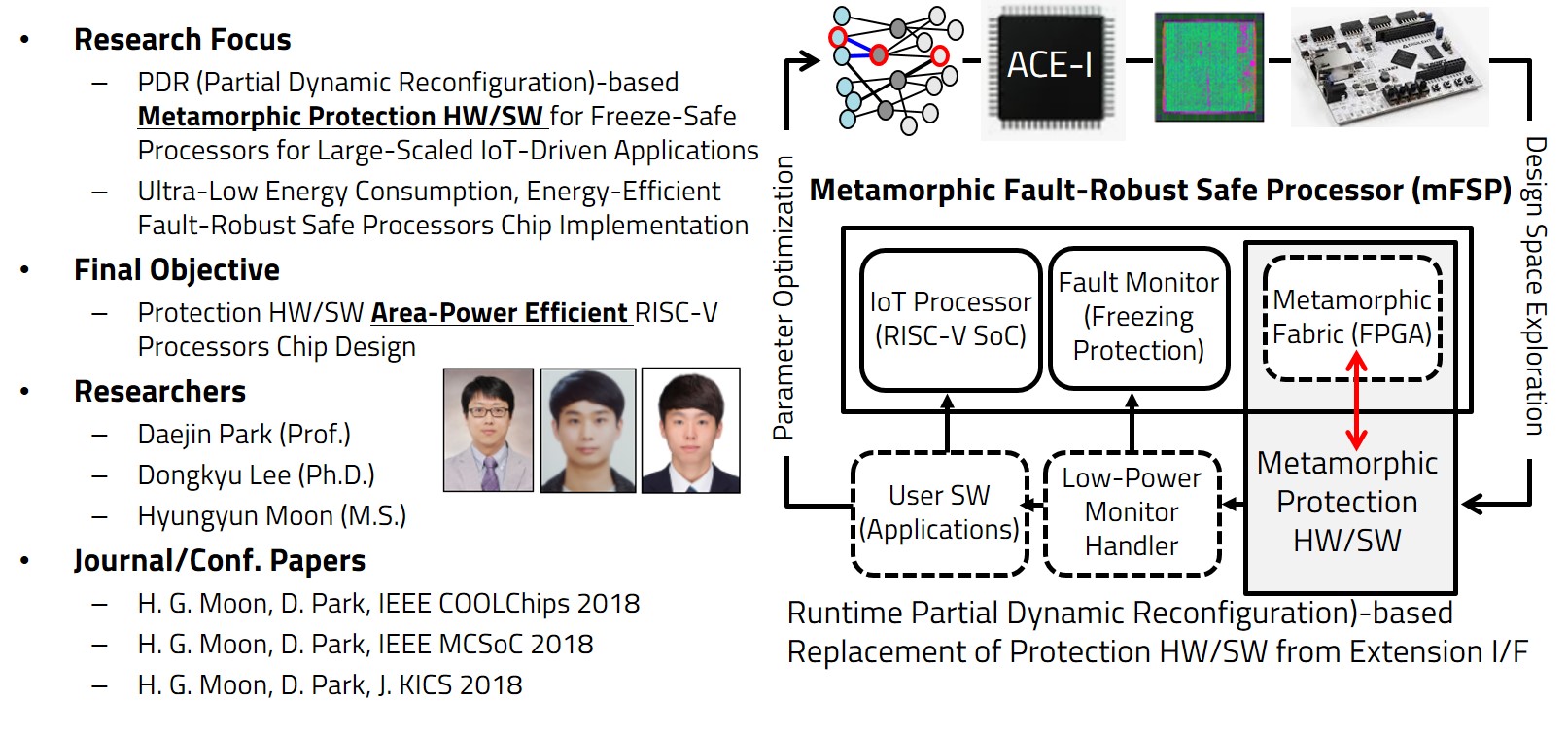
Metamorphic Fault-Robust Safe Processors (mFSP)
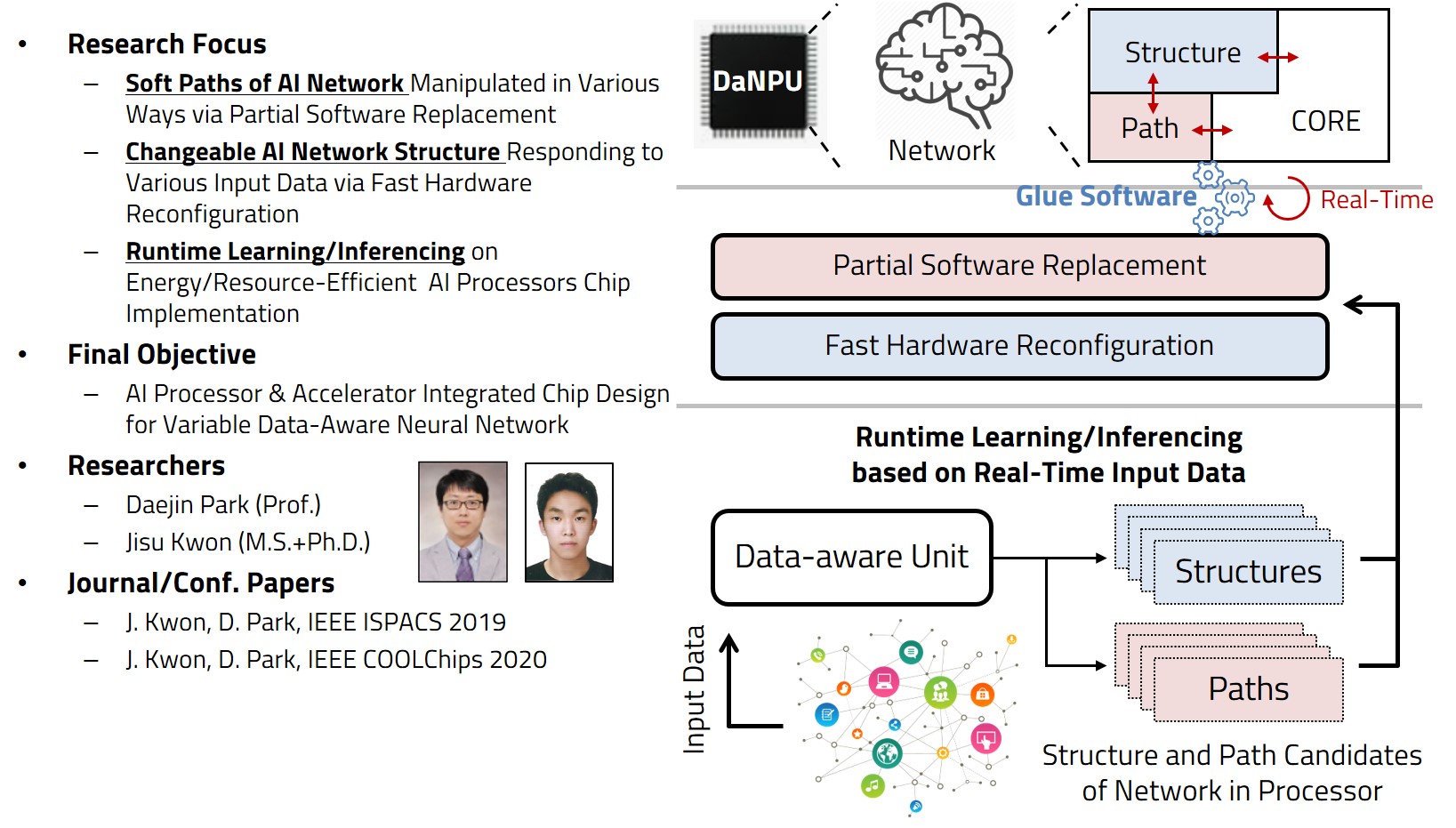
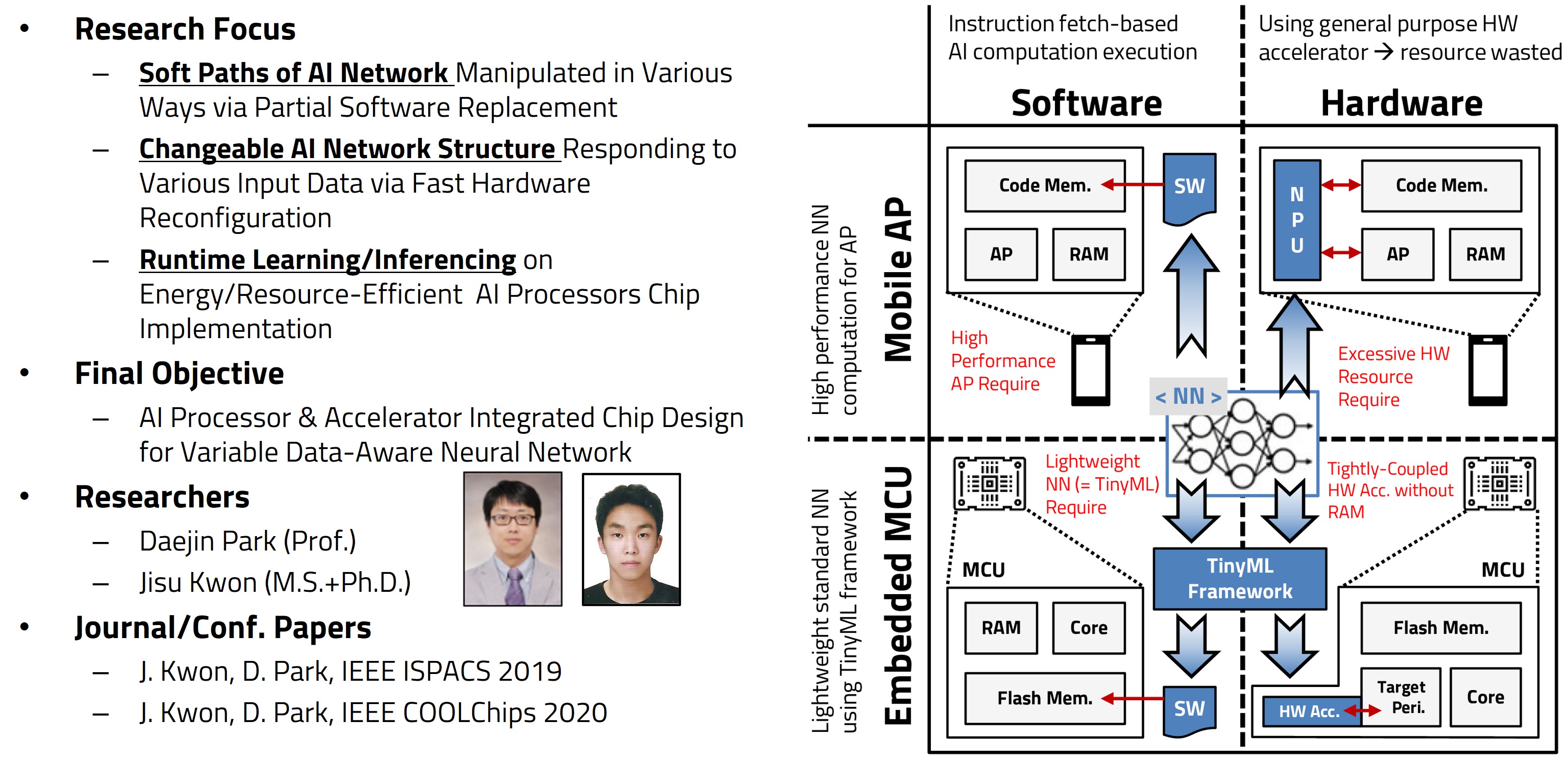
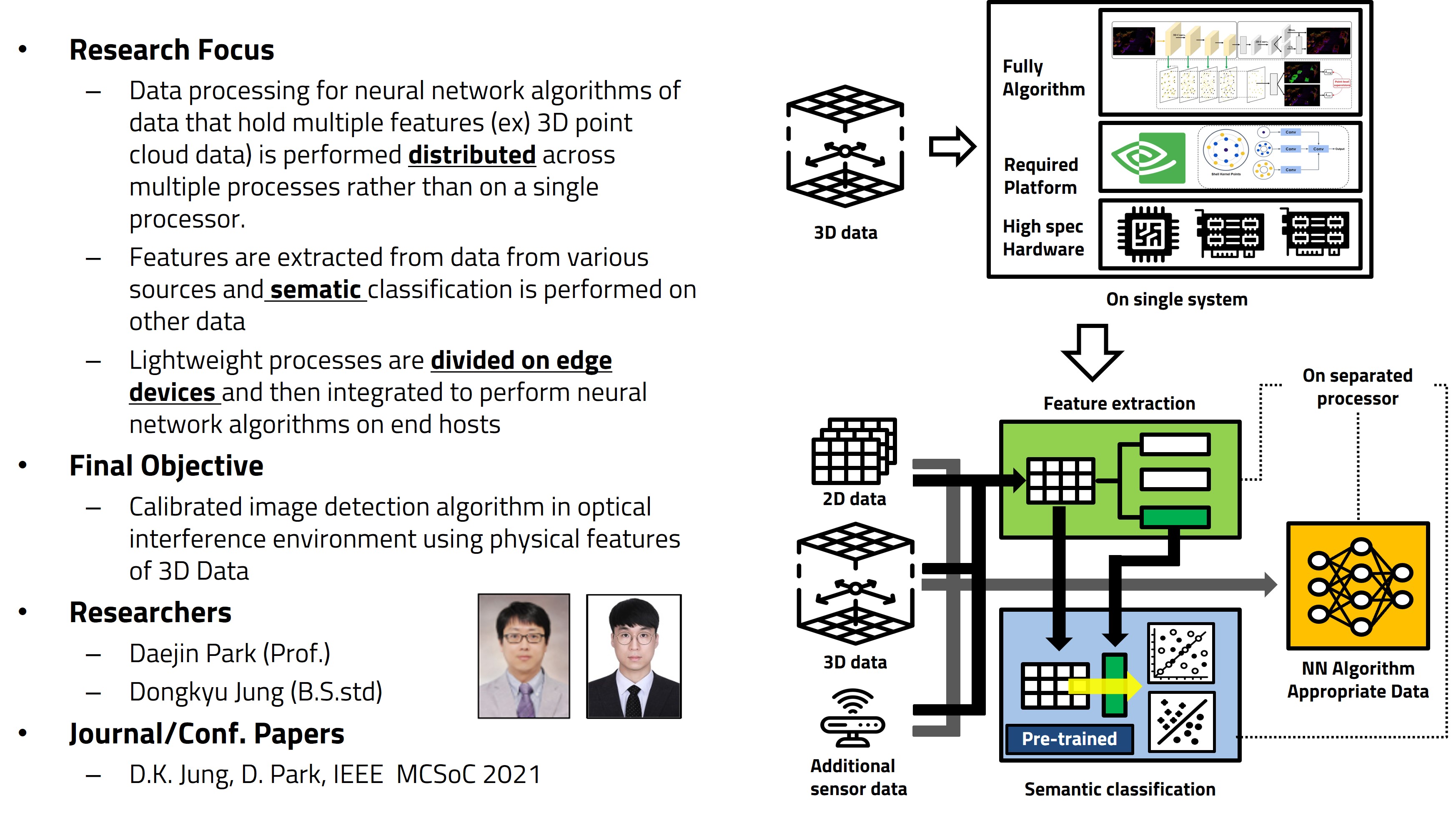
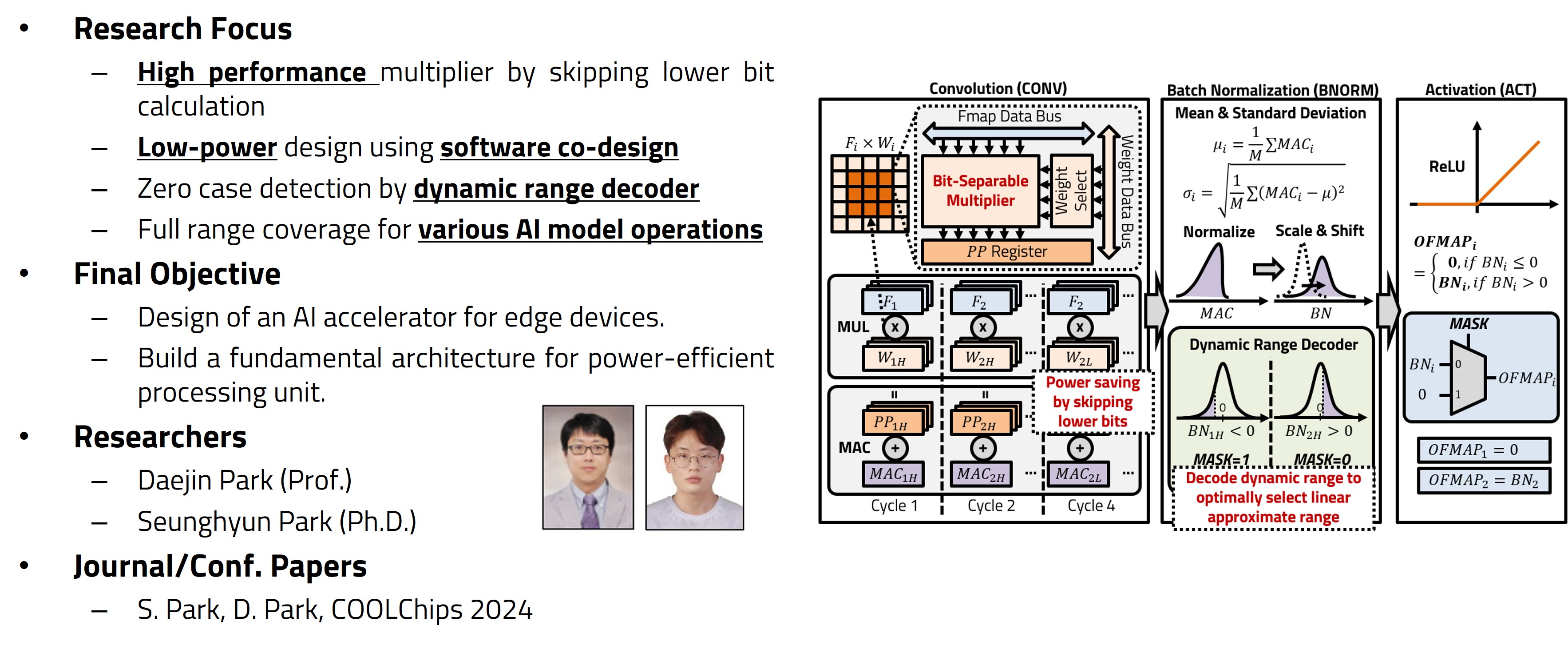
Data-aware Neural Processing Unit (DaNPU)
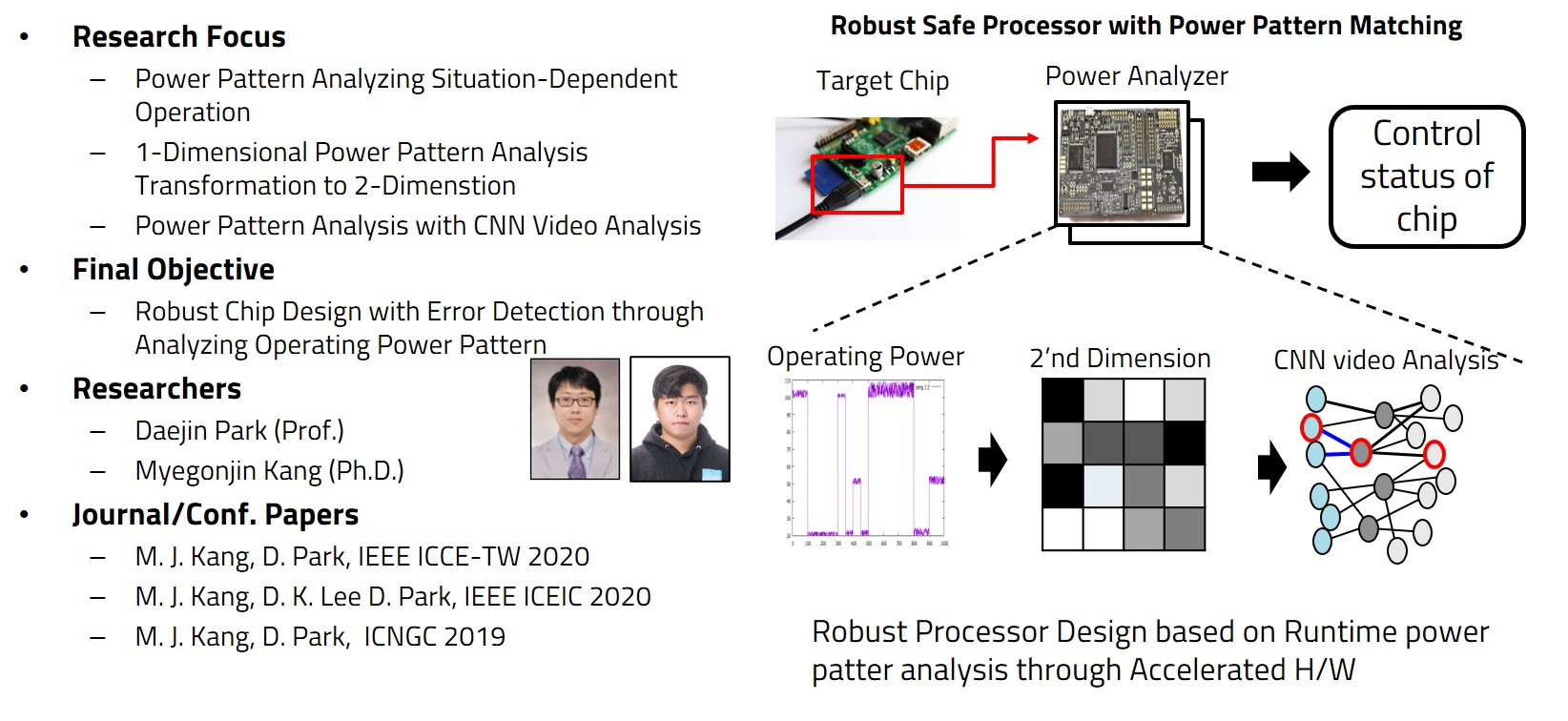
Robust Processor with Graphical Side-Channel Analyzer of Power Profile (SCA2D)
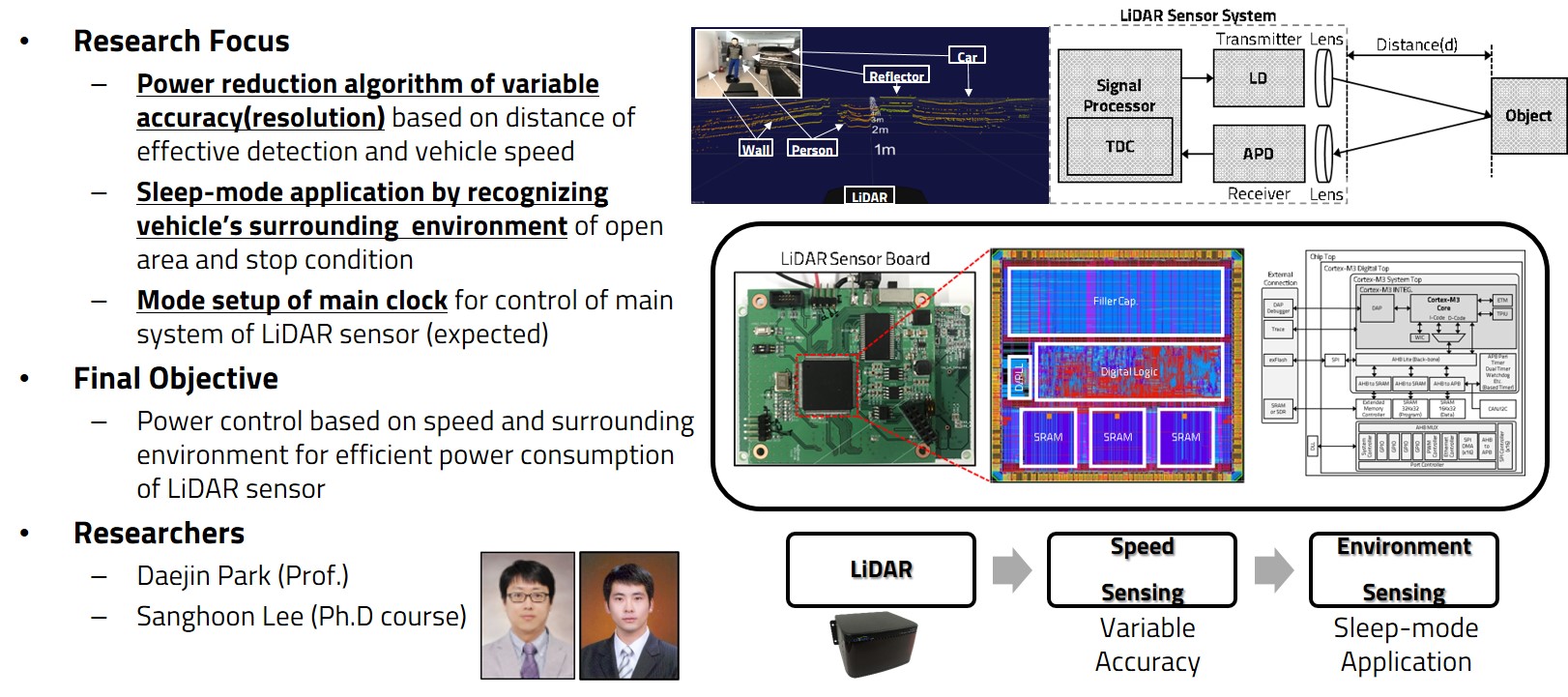
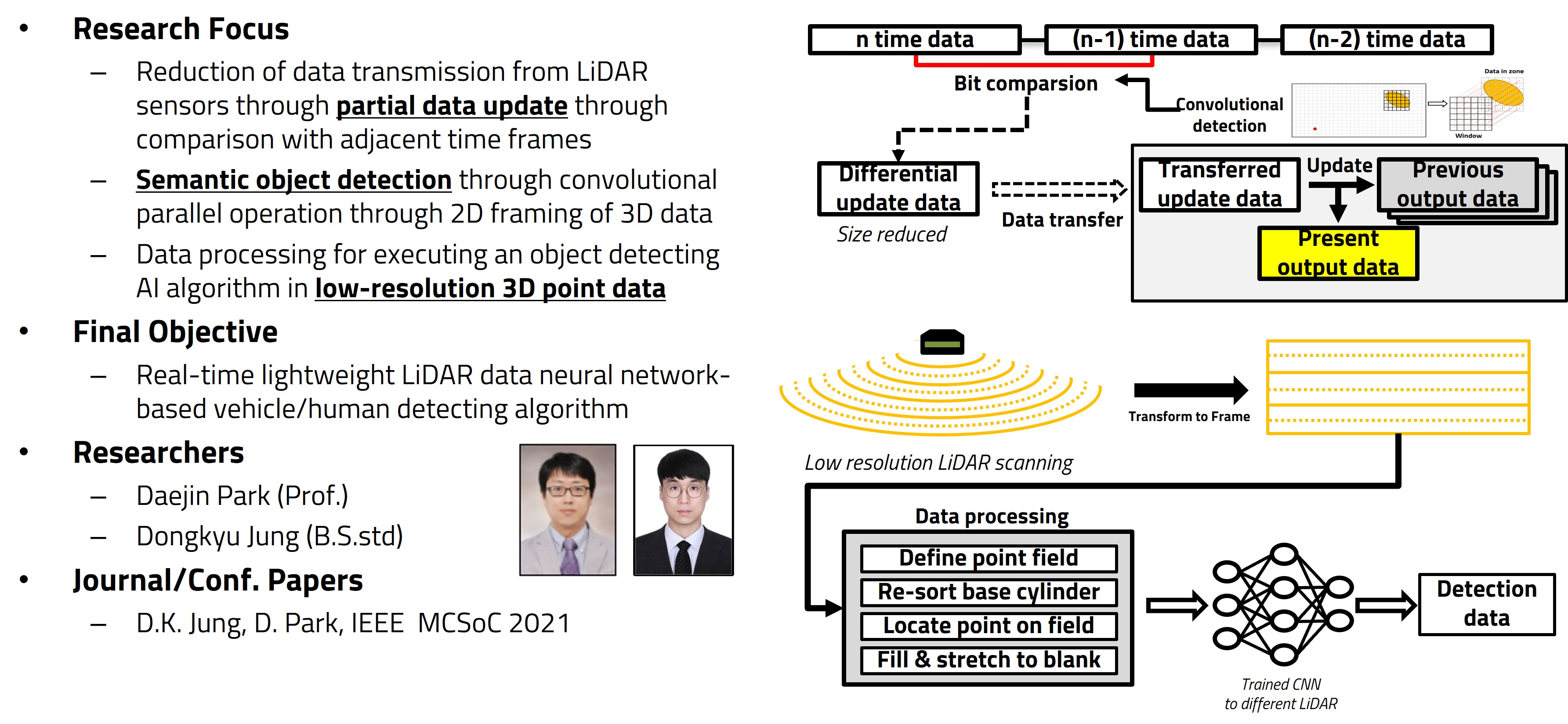
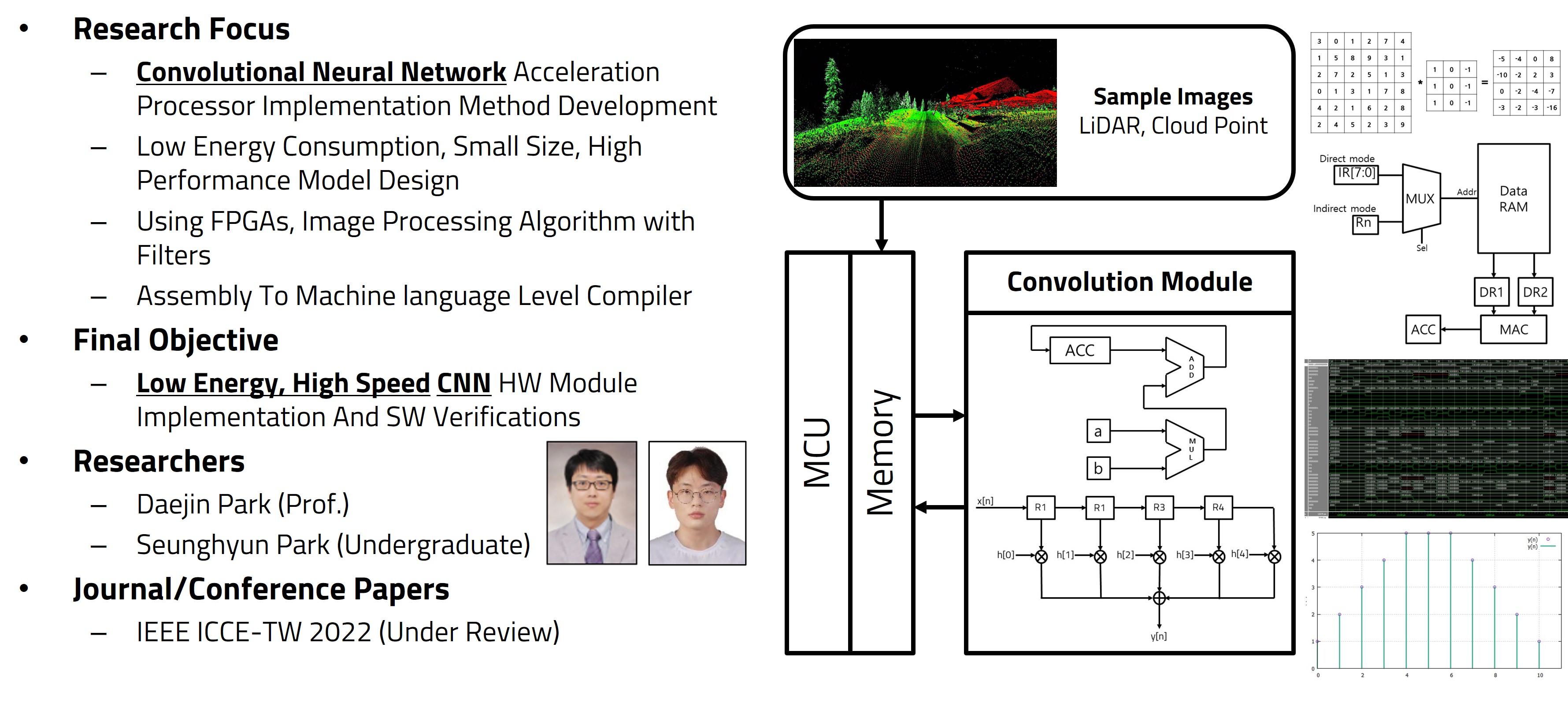
Low-Energy LiDAR Sensor Processor Platform for Environmental Sensing (eLDR)
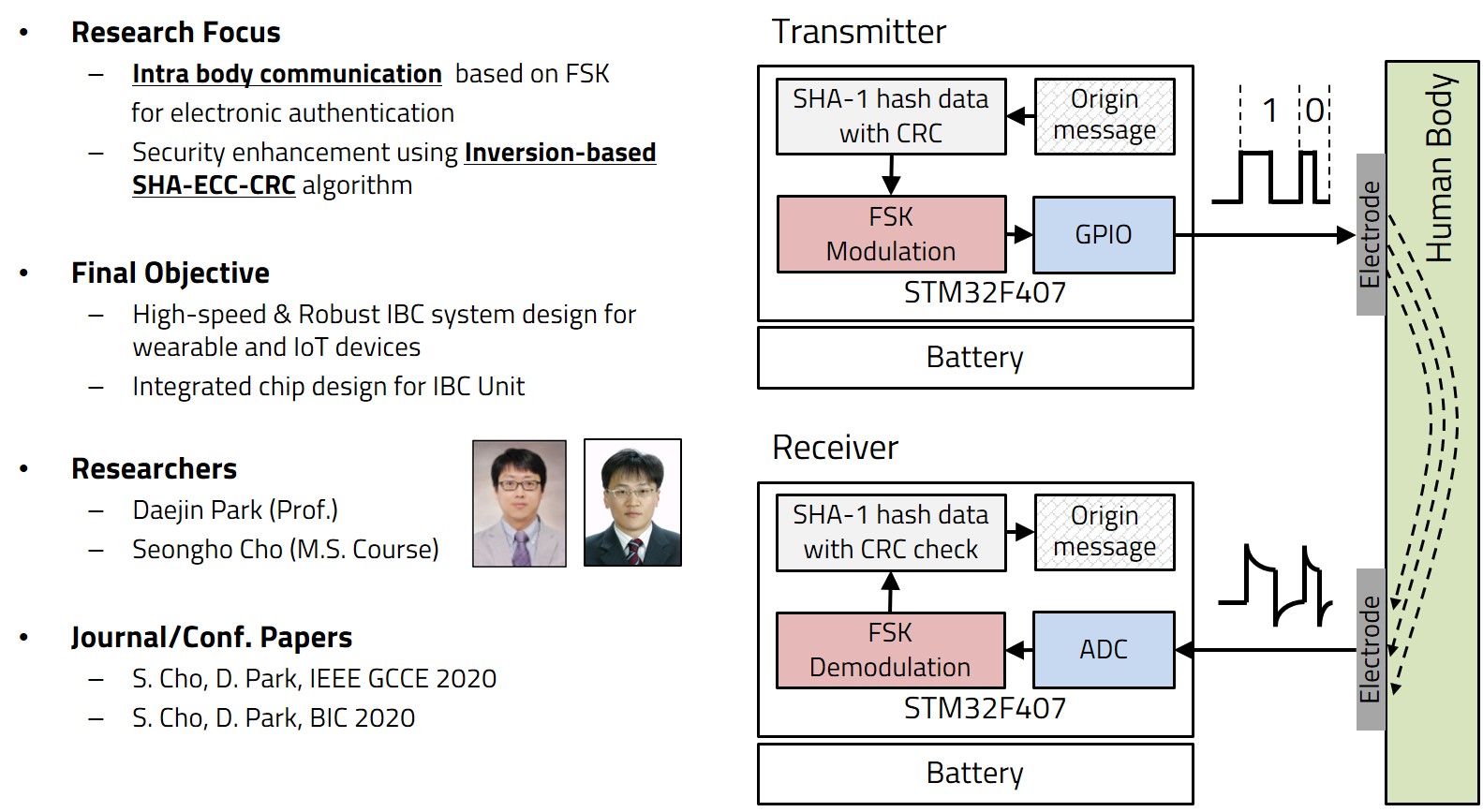
Intra Body Communication System (IBCS)
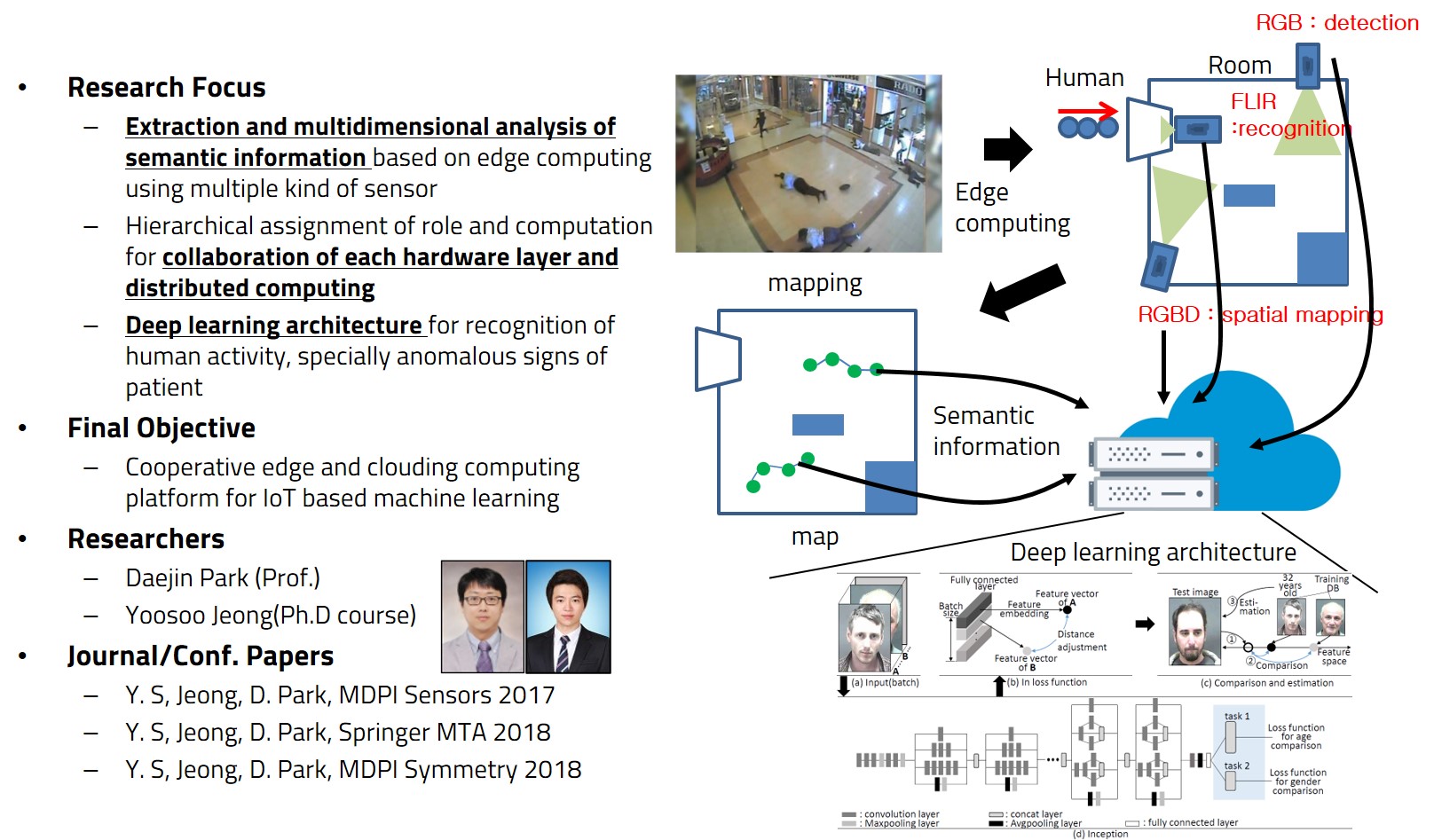
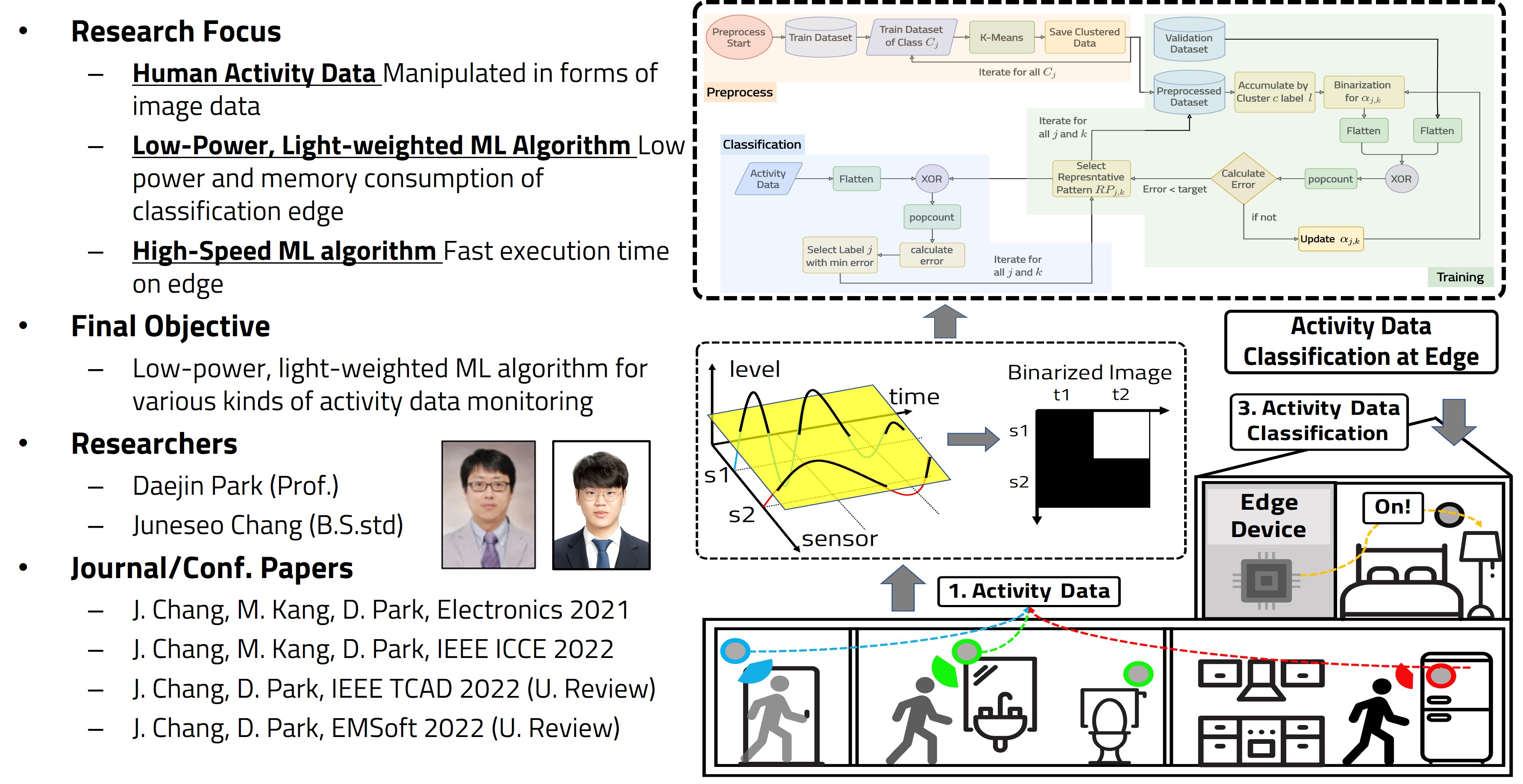
Distributed Machine Learning Computing for for Human Activity Monitoring (MLComp)
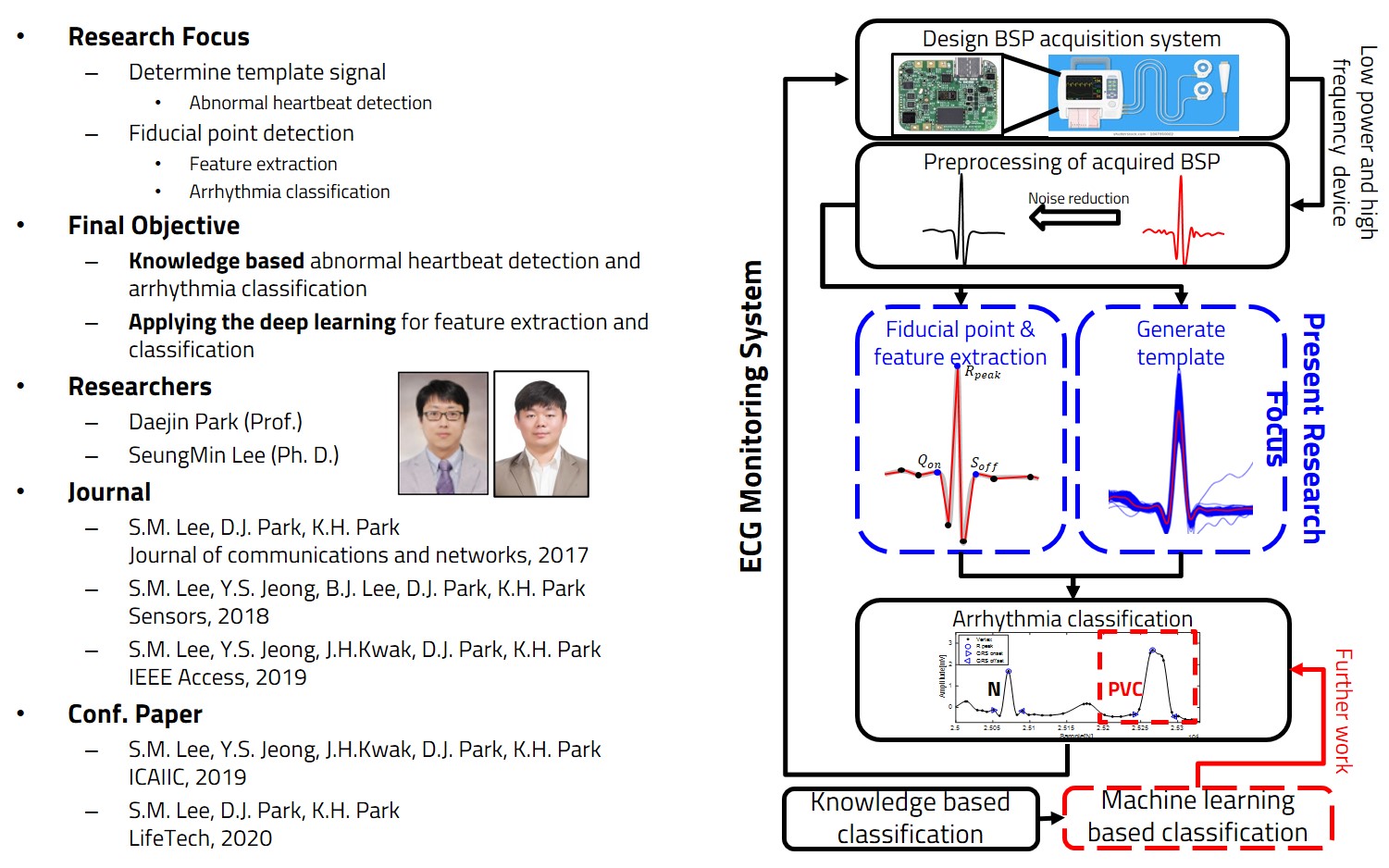
Efficient Bio-Signal Processing in Low-Power Device (EBioEP)
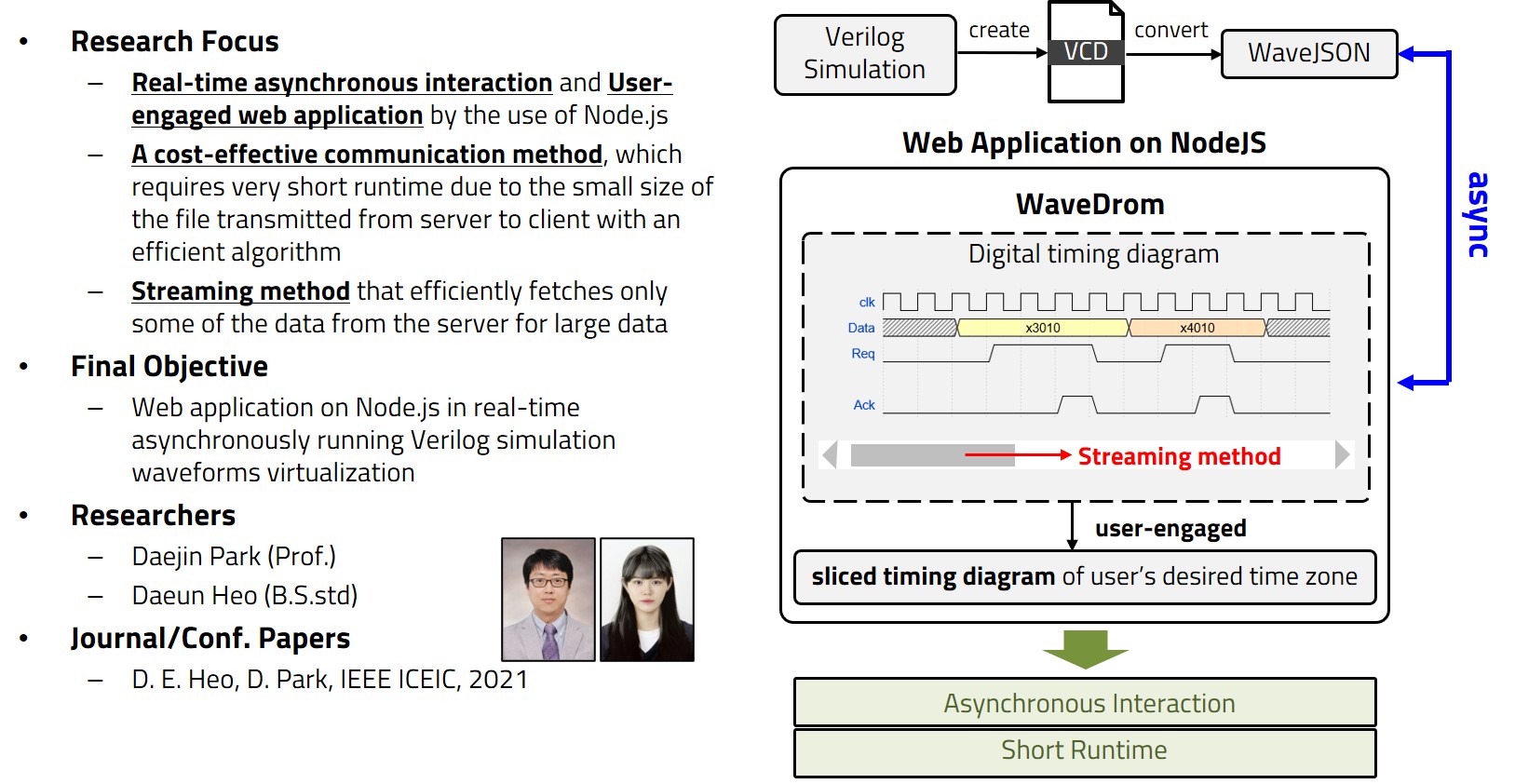
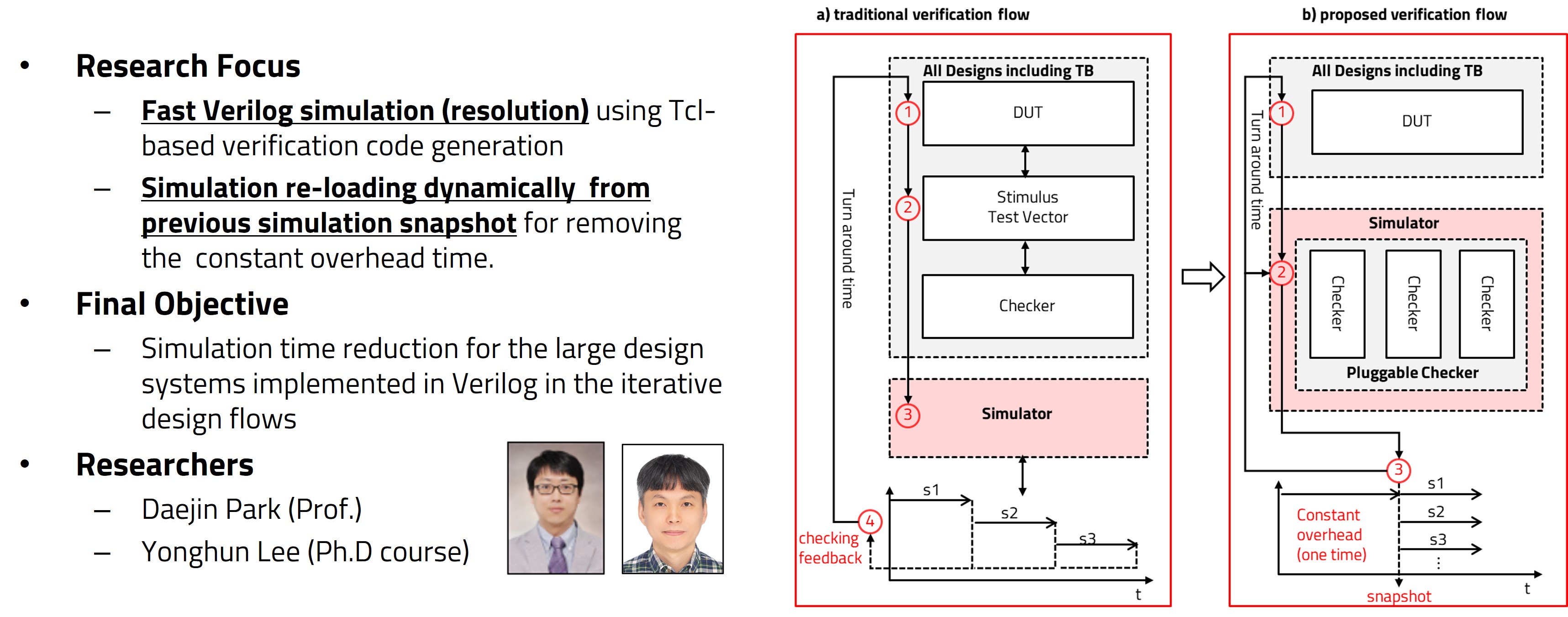
Verilog Simulation Waveform Virtualization (VeriSimVir)
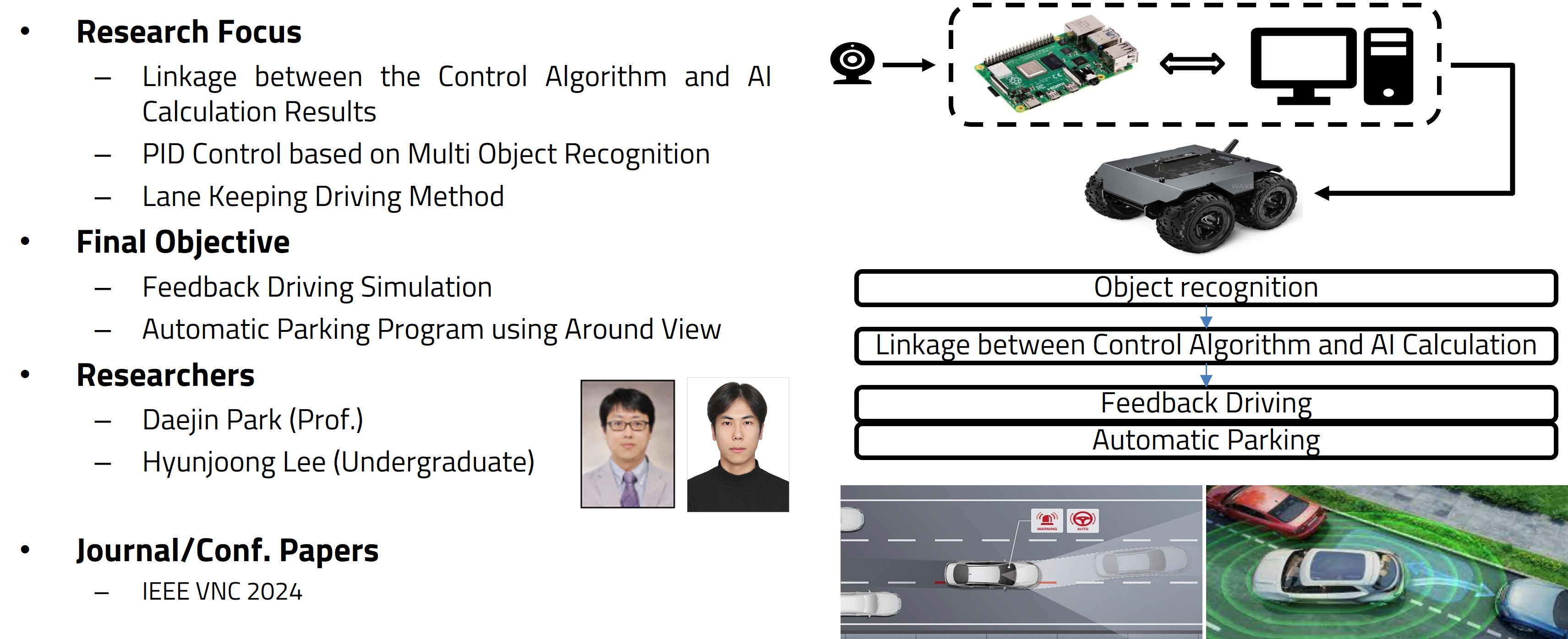
Autonomous Vehicle Control Virtualization (AutoVCV)
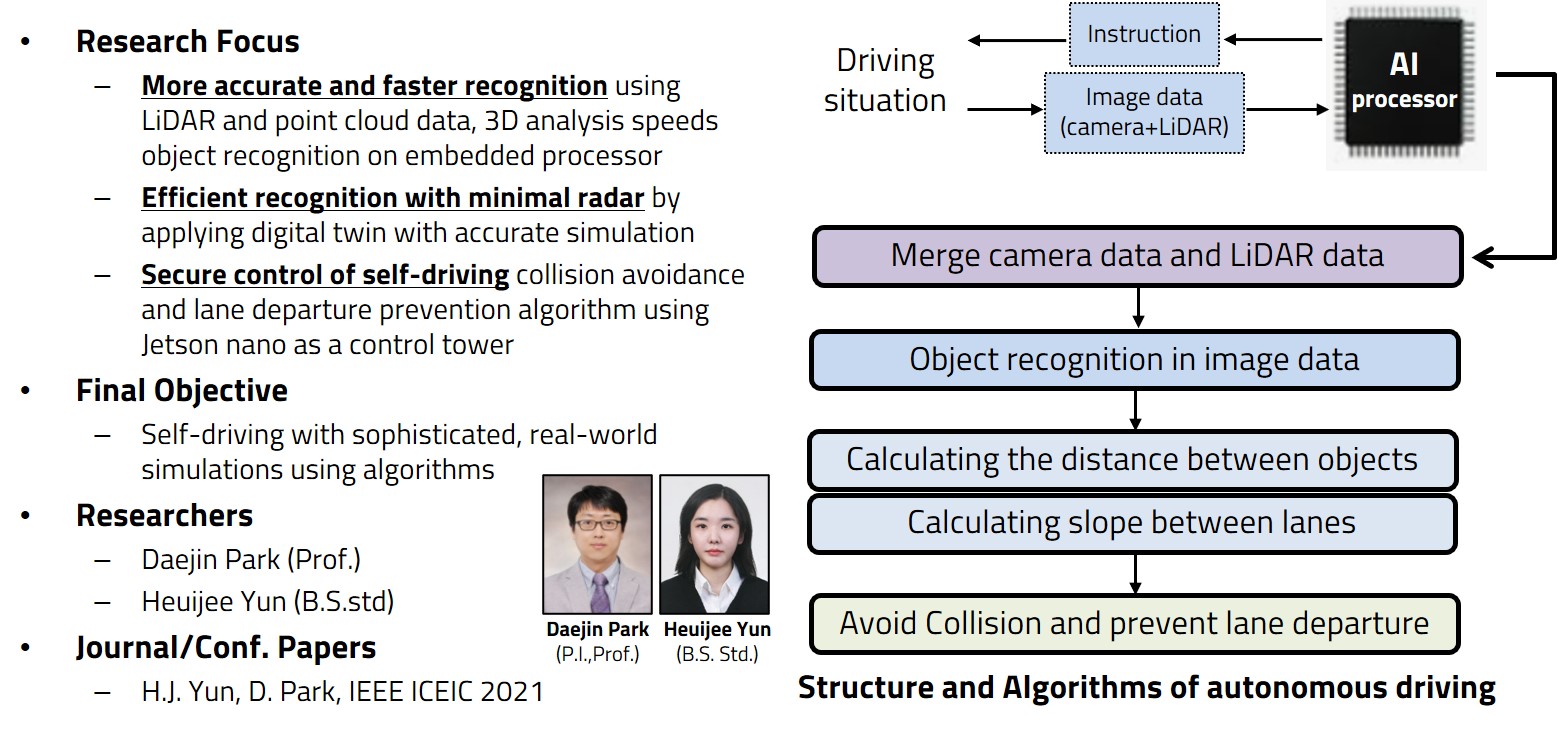
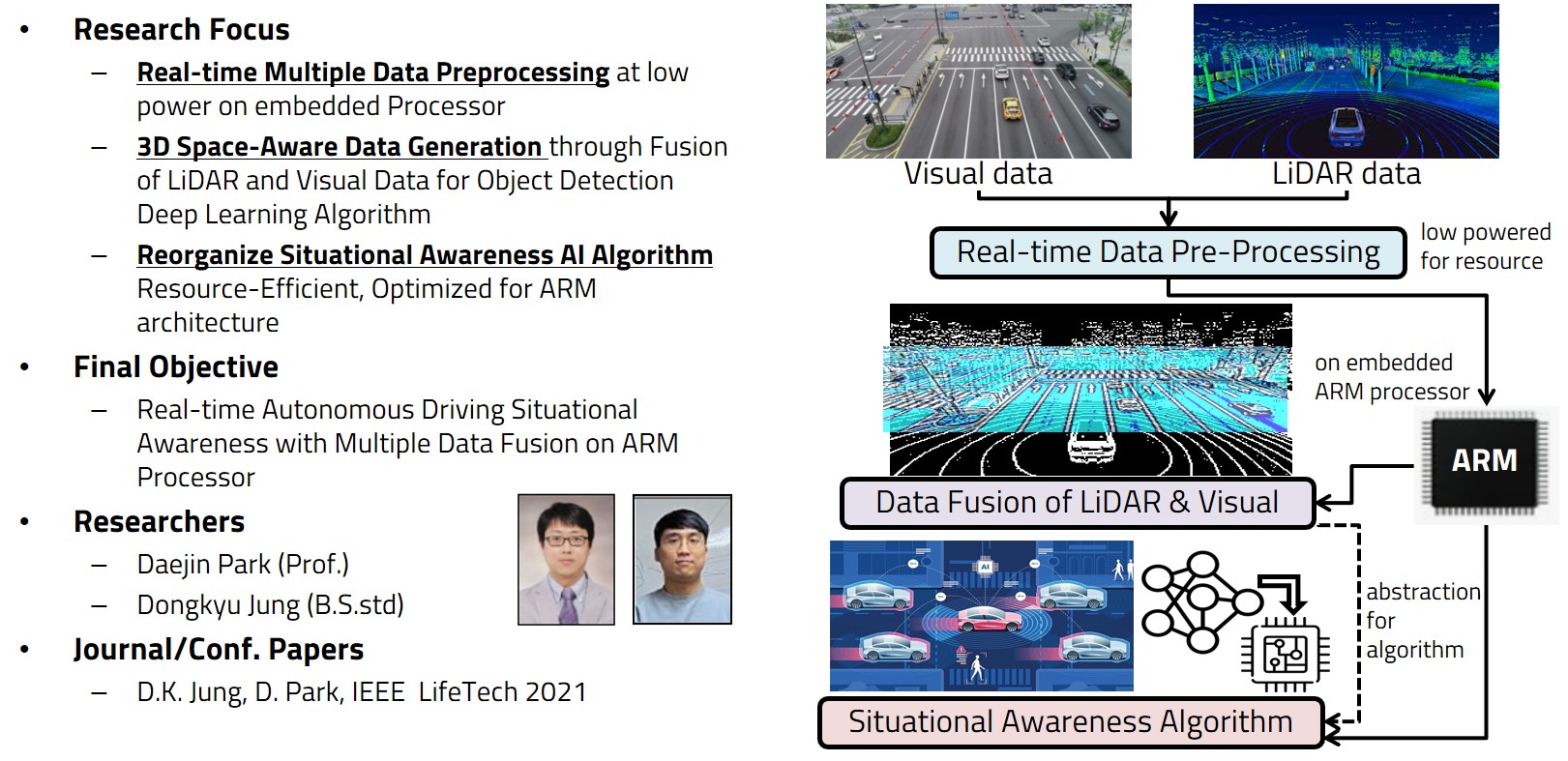
Situation-Aware Autonomous Driving Algorithm on Embedded ARM Processors (SAADA)
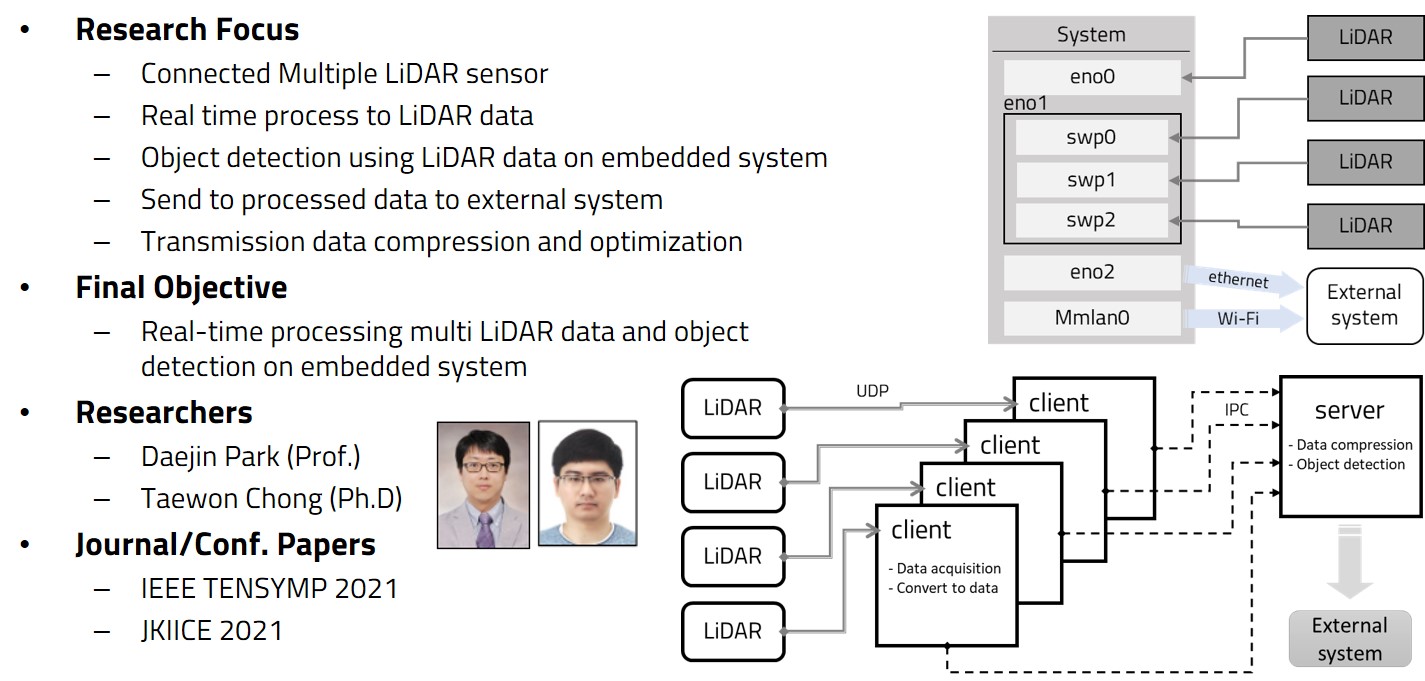
LiDAR Sensor Integrated Processing Unit (LSIPU)
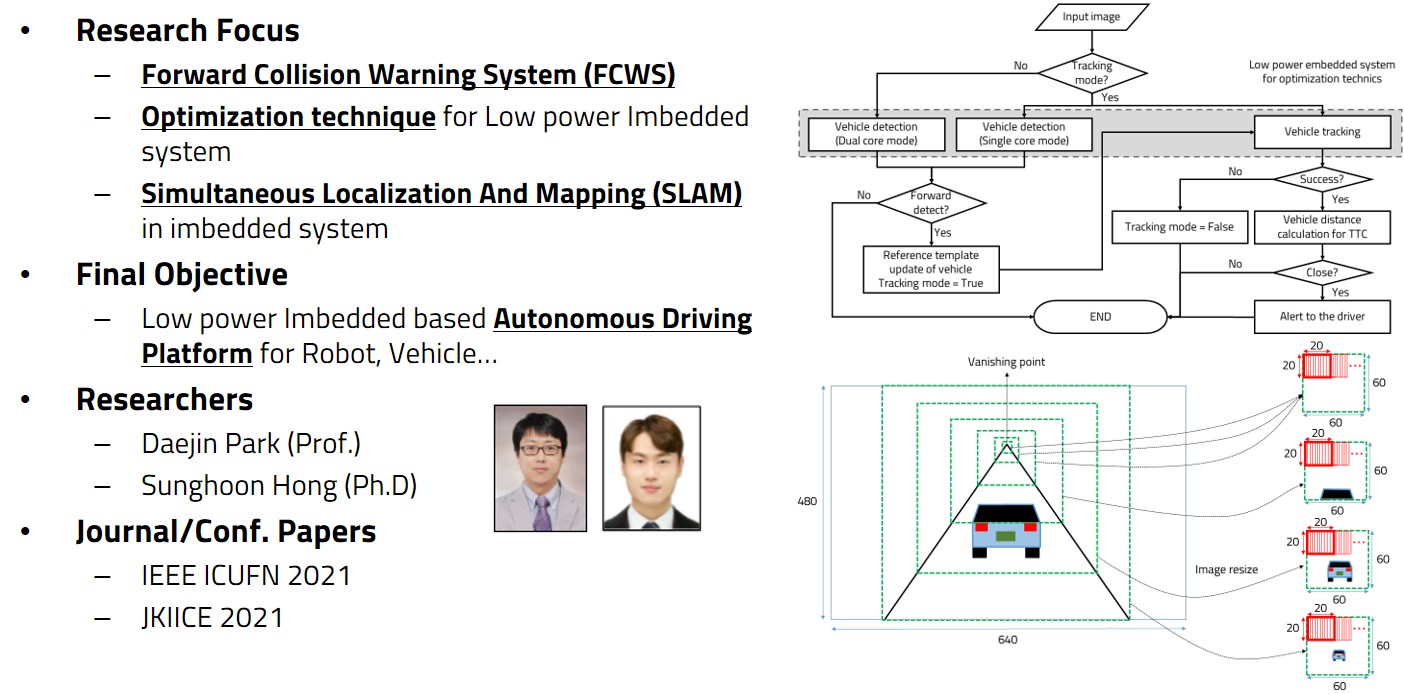
Lightweight Intelligent Forward Collision Warning Systems (LIFCWS)
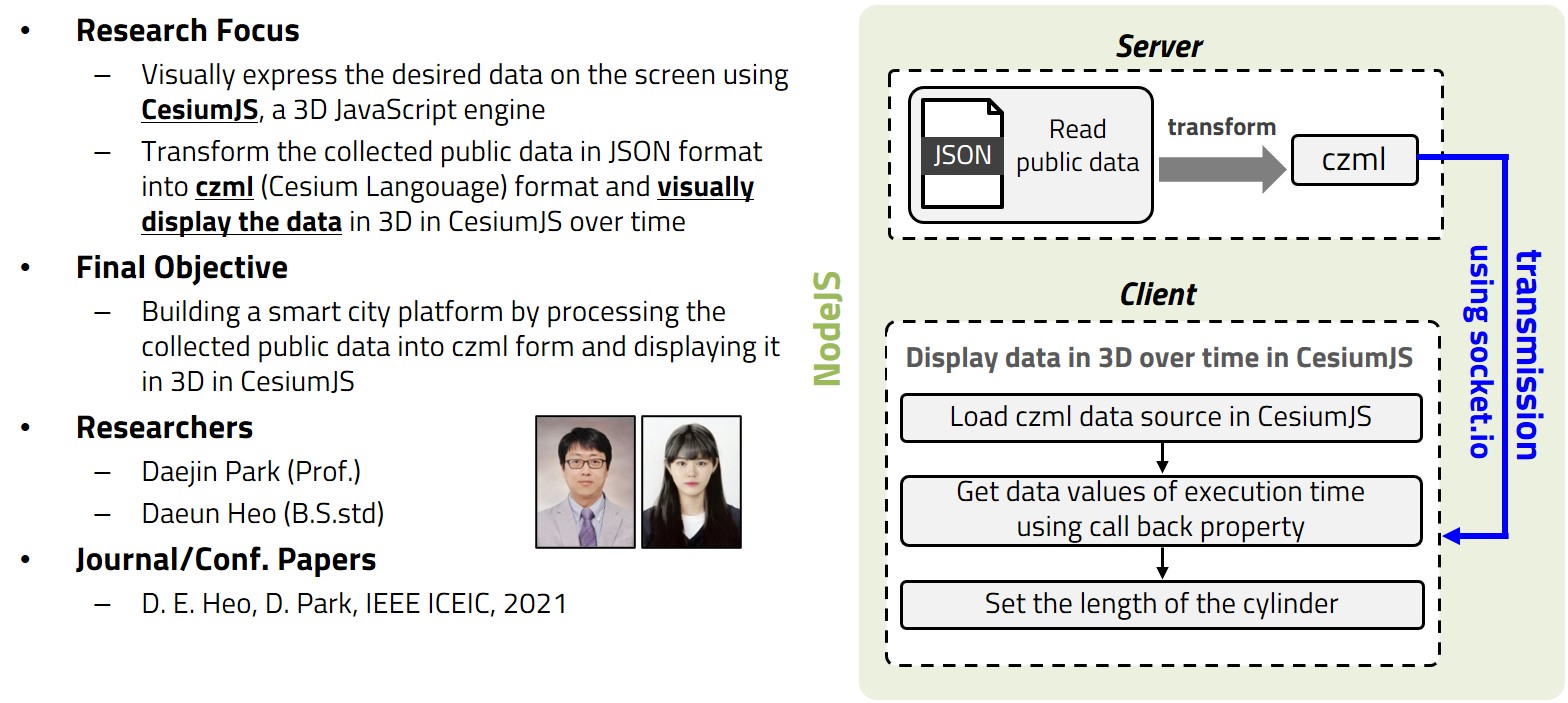
Dynamic Asynchronous Visualization of Smart City Objects (SmartObjectAsync)
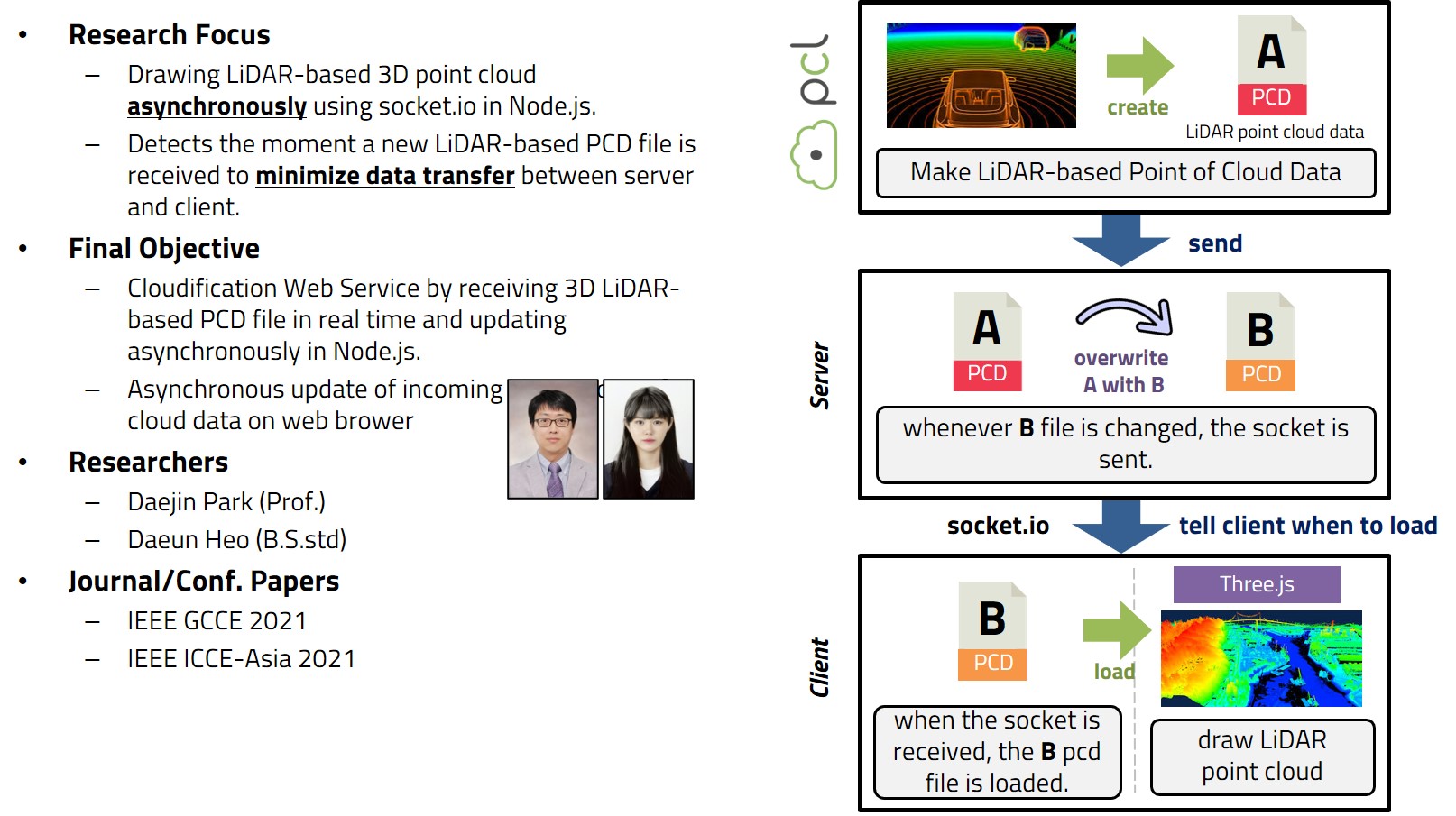
Web-based Asynchronous Visualization of LiDAR Point of Cloud Data (LiDAR-Web)
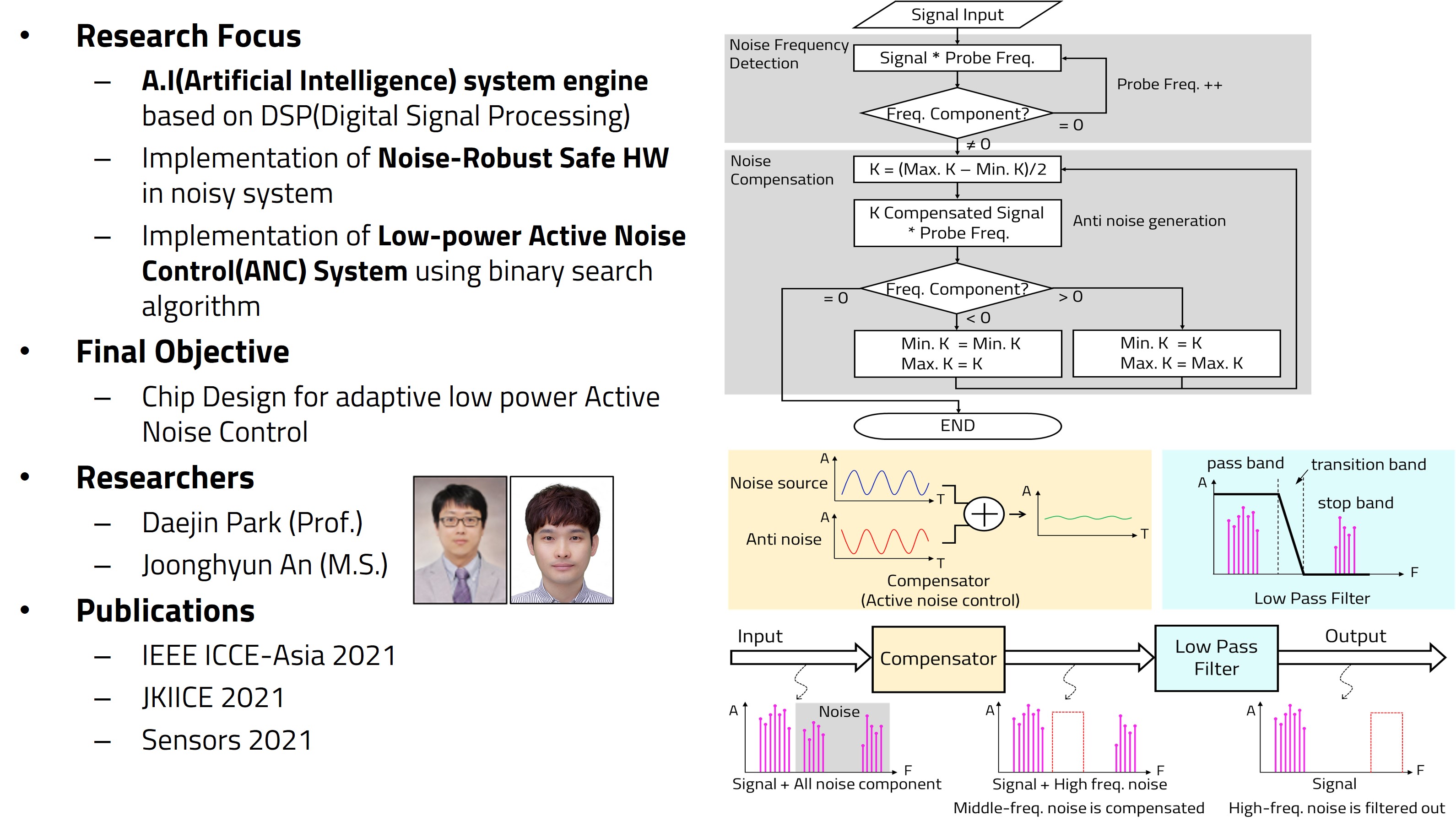
Runtime Compensation Coefficient Optimization for Active Noise Cancelling (LANCS)
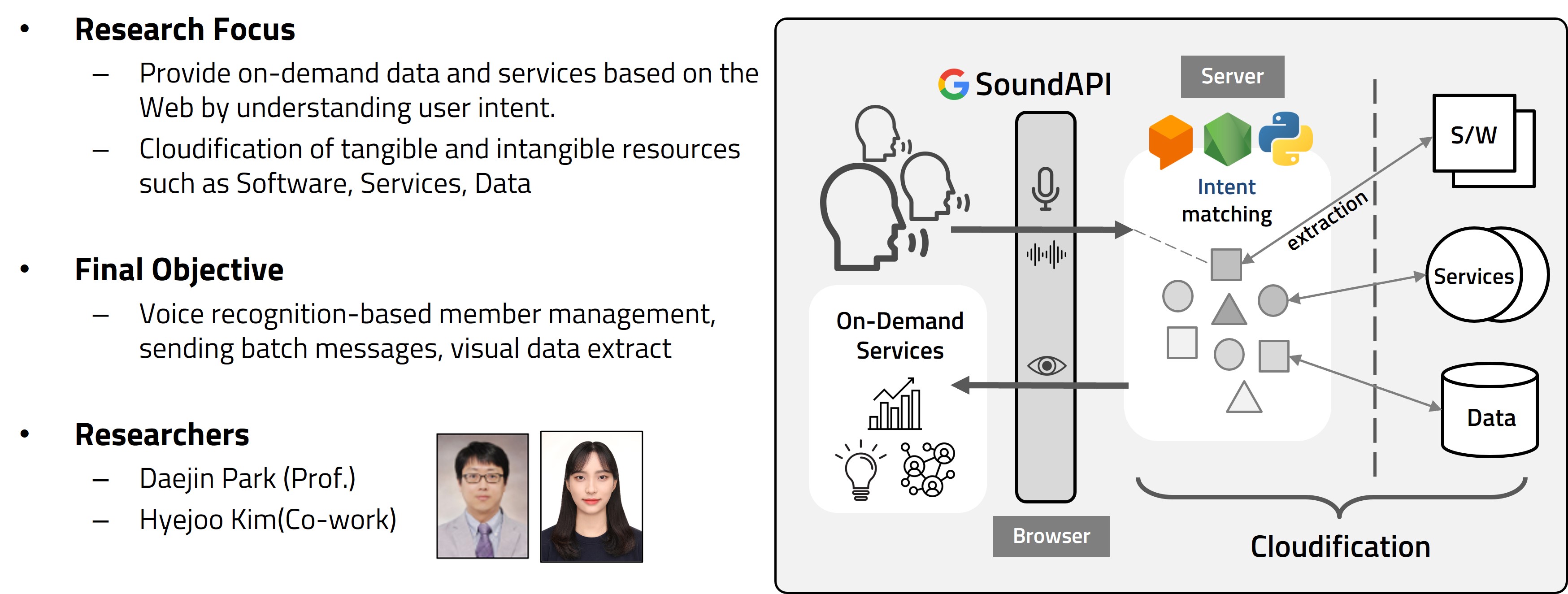
SoundAPI for On-Demand Services
Low-Power On-Chip ML for Activity Classification (eMLAC)
Lightweighted LiDAR DSP Powered by Neural Networks (LiDARNN)
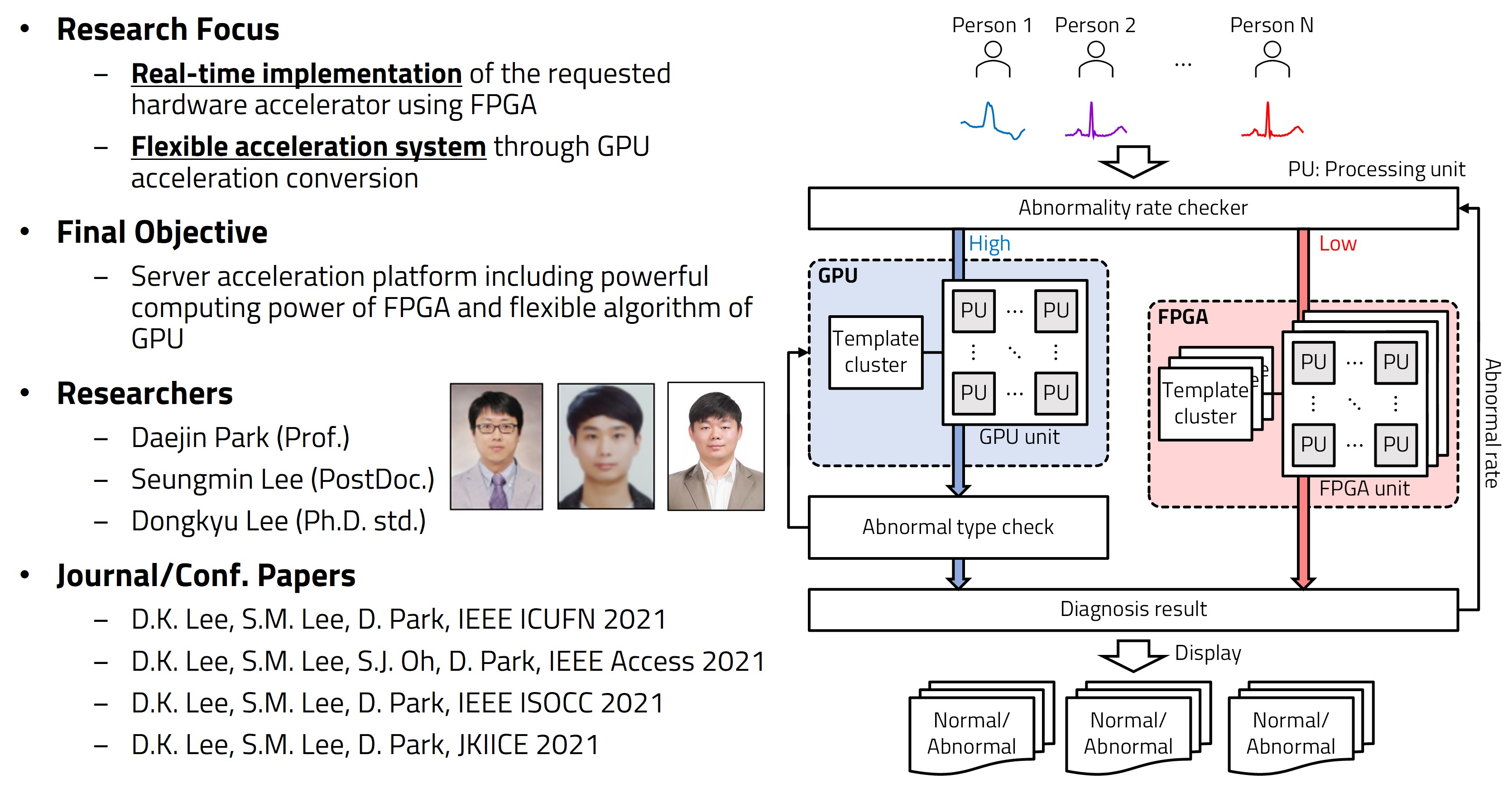
OpenCL based FPGA-GPU Hybrid Acceleration Server
LiDAR Convolution Neural Network Processor (LiCNNP)
TinyML-based AI Microcontrollers (TinyMCU)
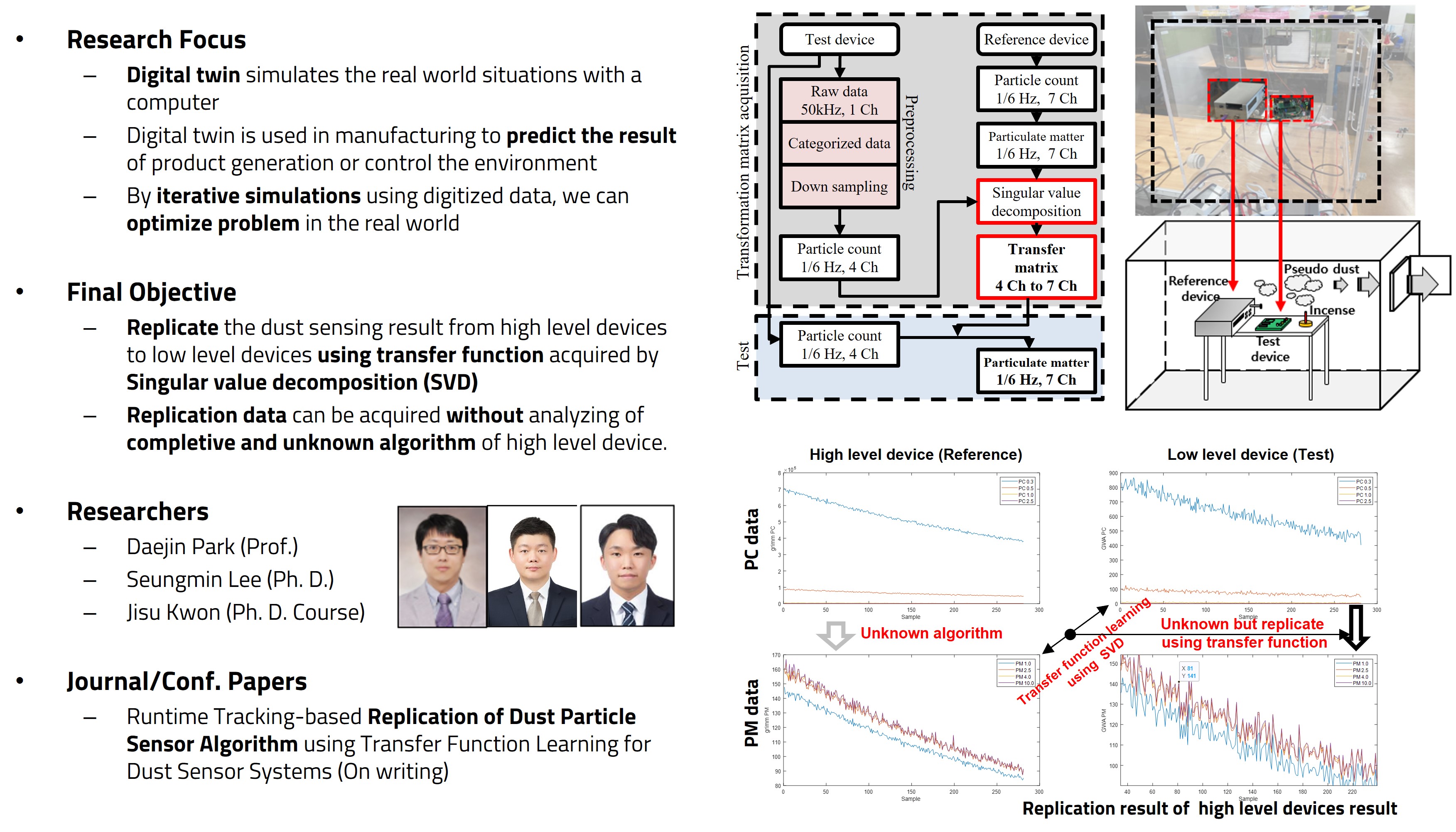
Digital Twin-based Embedded-AI Software Integration (DT-EmSOFT)
FPGA Implementation of AI Software Executable Things (FPGA-Things)
Lightweighted Semantic CNN AI Algorithm Implementation (SemanticCNN)
Dynamic Reloading-based Fast Verilog Simulation (DRSim)
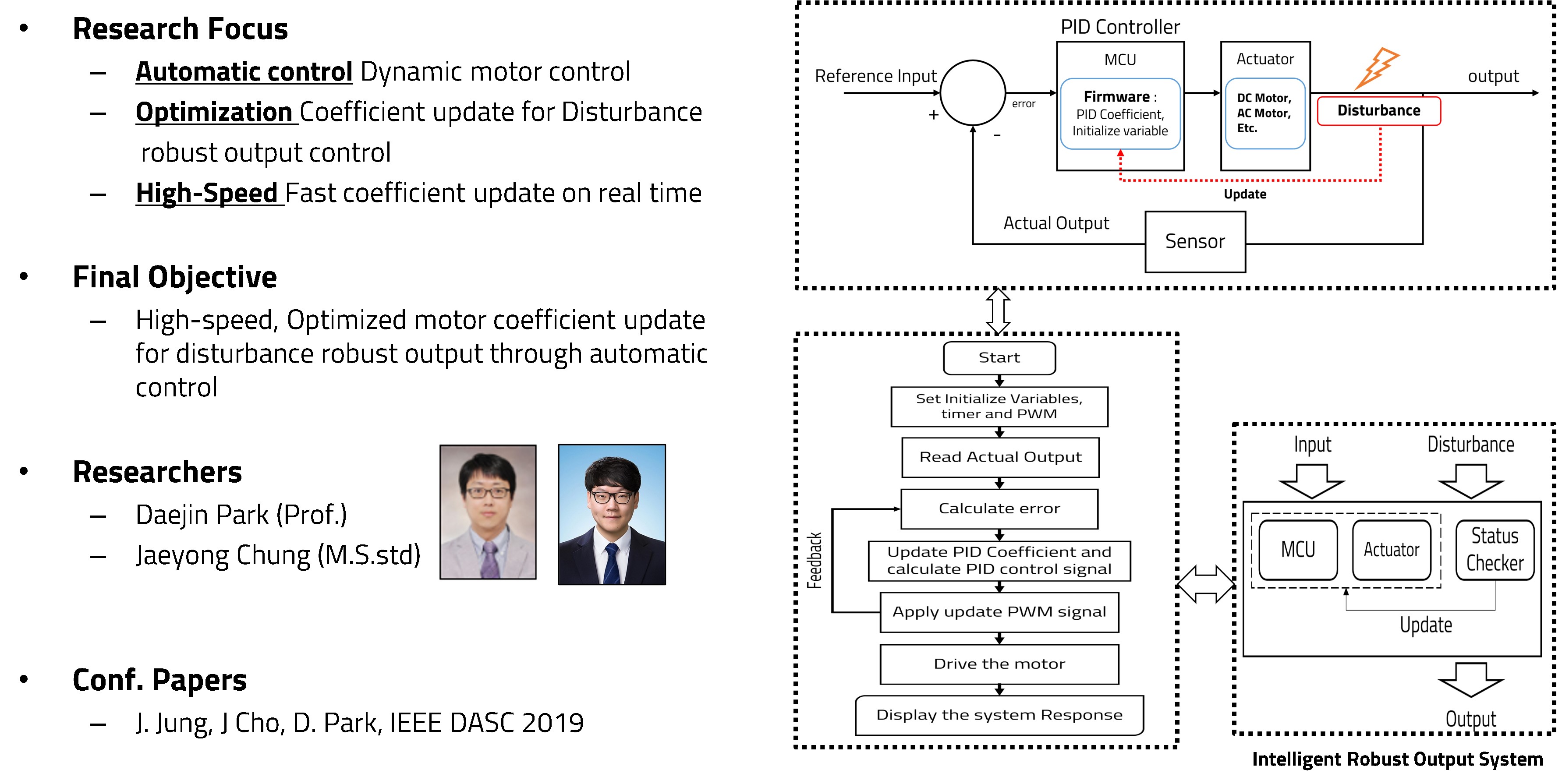
Runtime Control Coefficient Update for Robust Microcontroller (iMRUC)
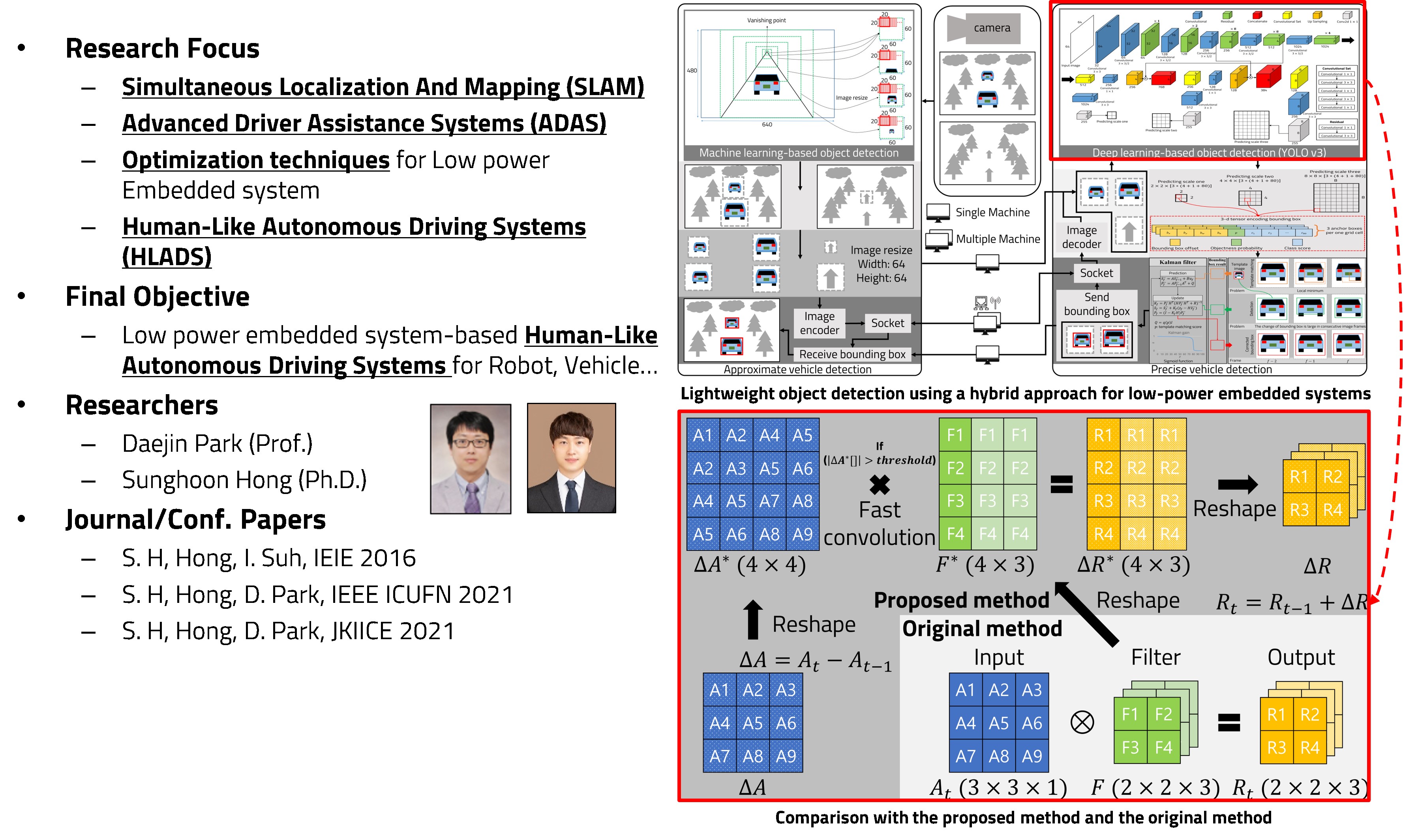
Human-Like Autonomous Driving Systems (HLADS)
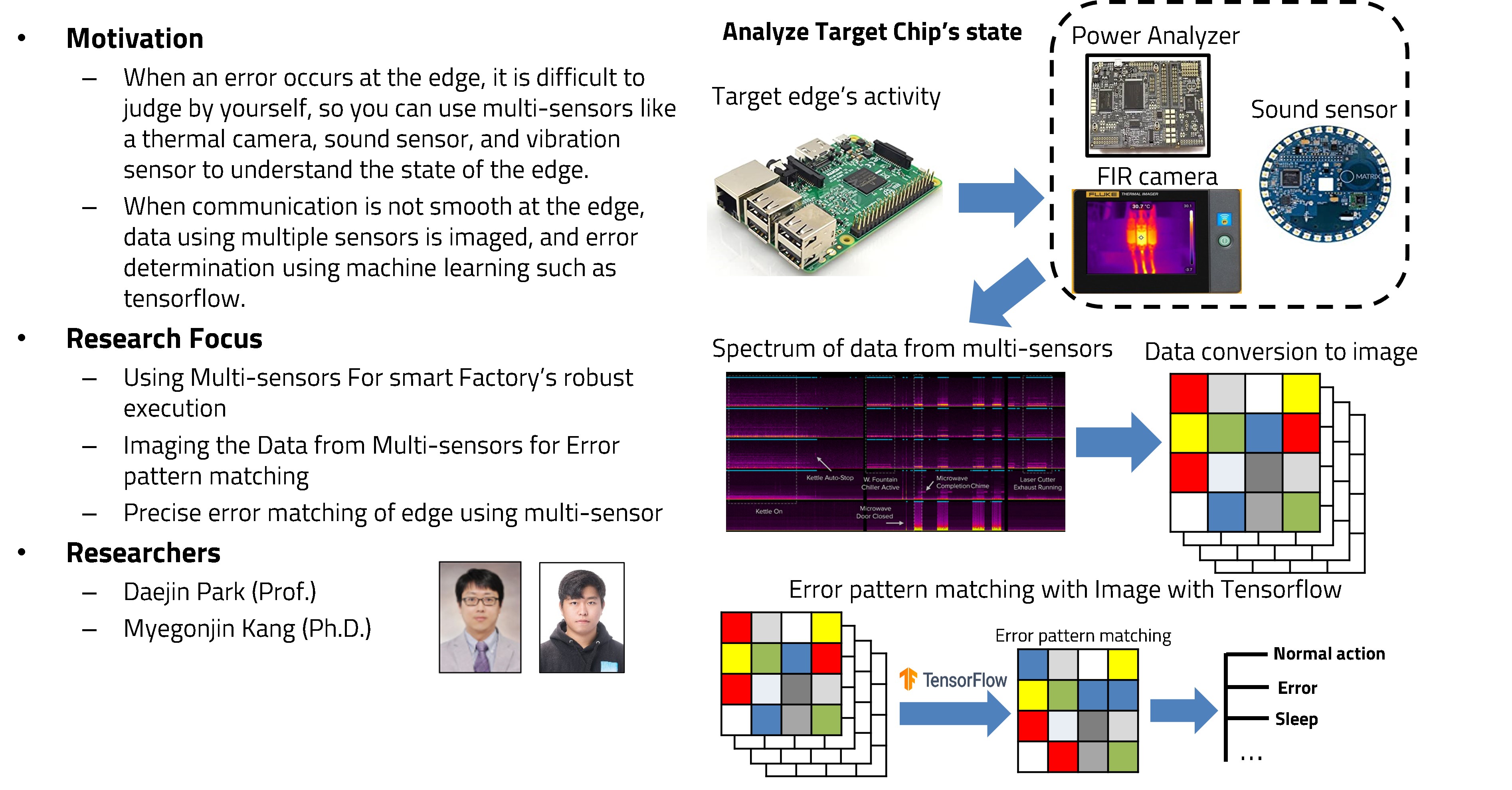
Detecting Unsafe Software using Sensor-Fusion Image Classification (UnSafeFUS)
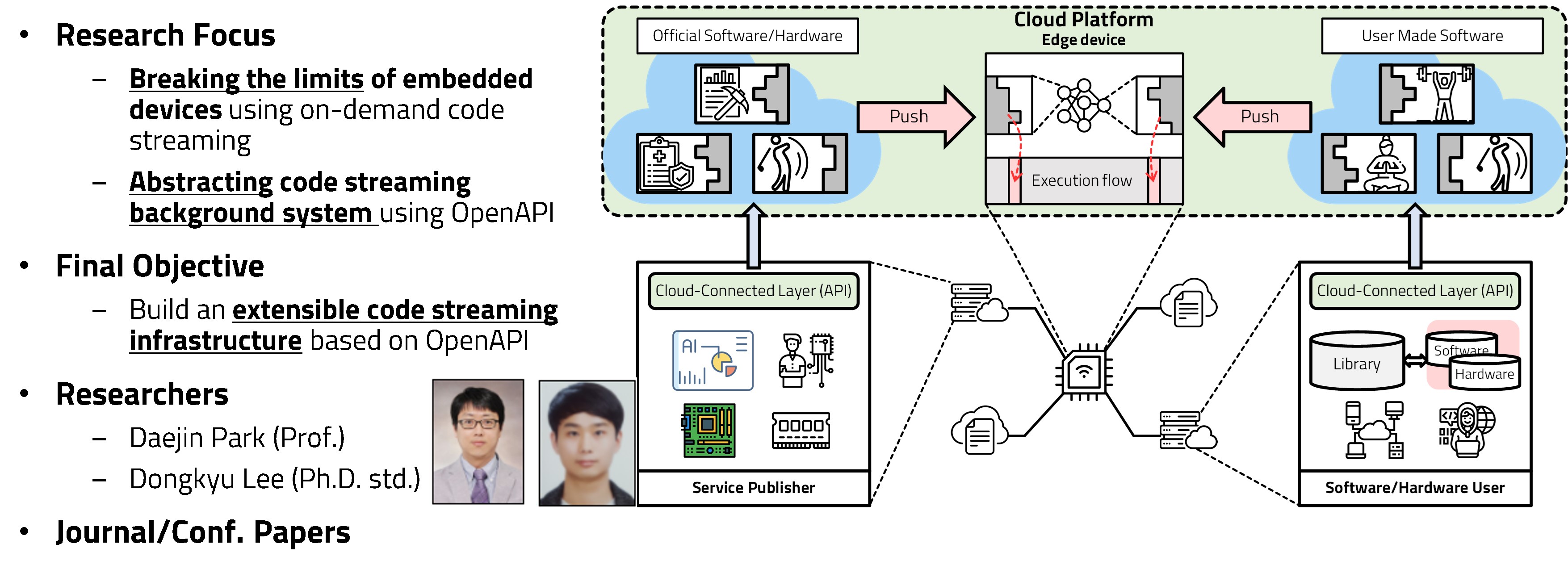
OpenAPI-based Edge-Cloud Infrastructure (OpenAPIEdgeCloud)
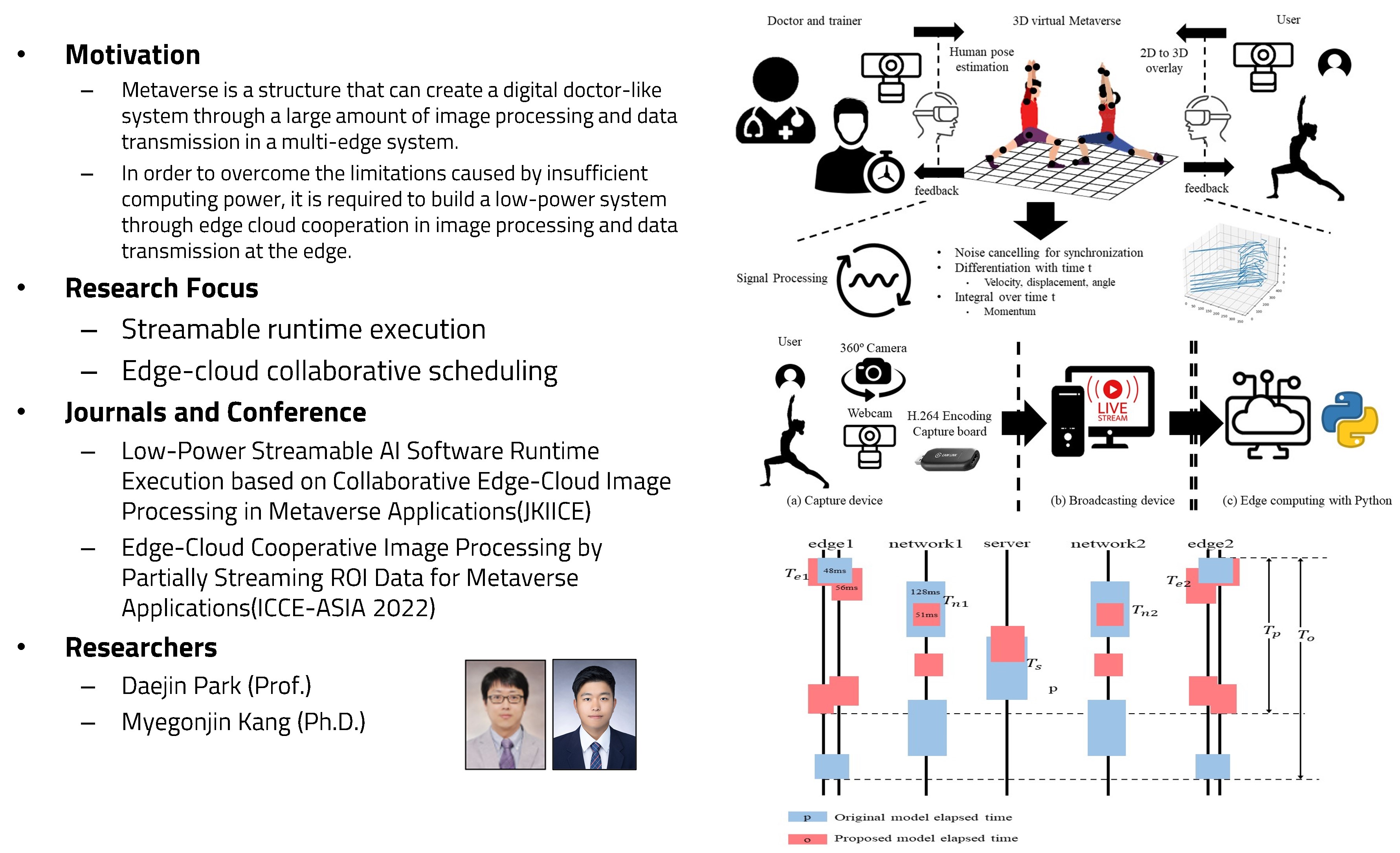
Metaverse Digital Doctor on Edge-Cloud Collaborative Image Processing (MetaDoctor)
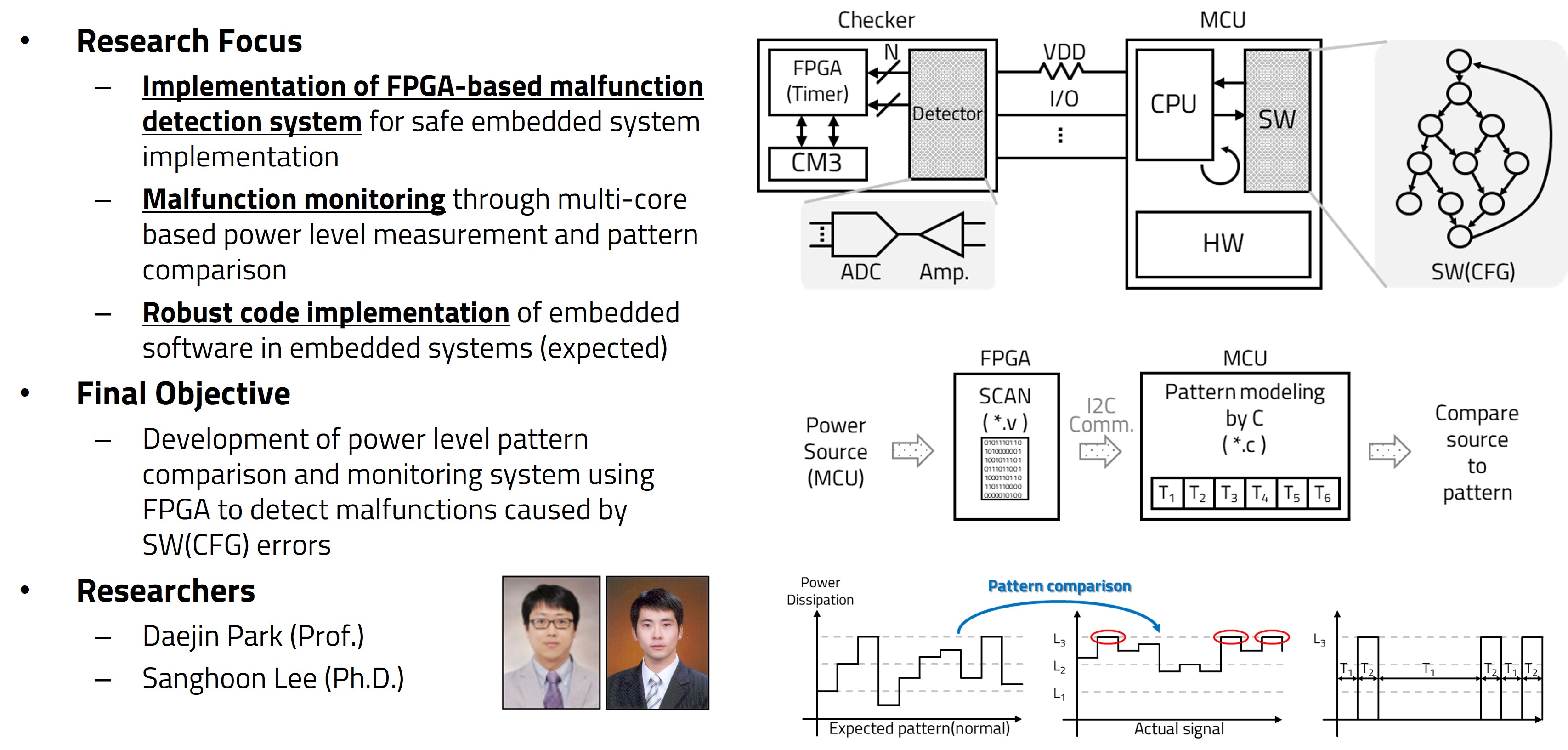
Power Pattern Monitoring-based Unsafe Software Malfunction Detection (SafeSOFT)
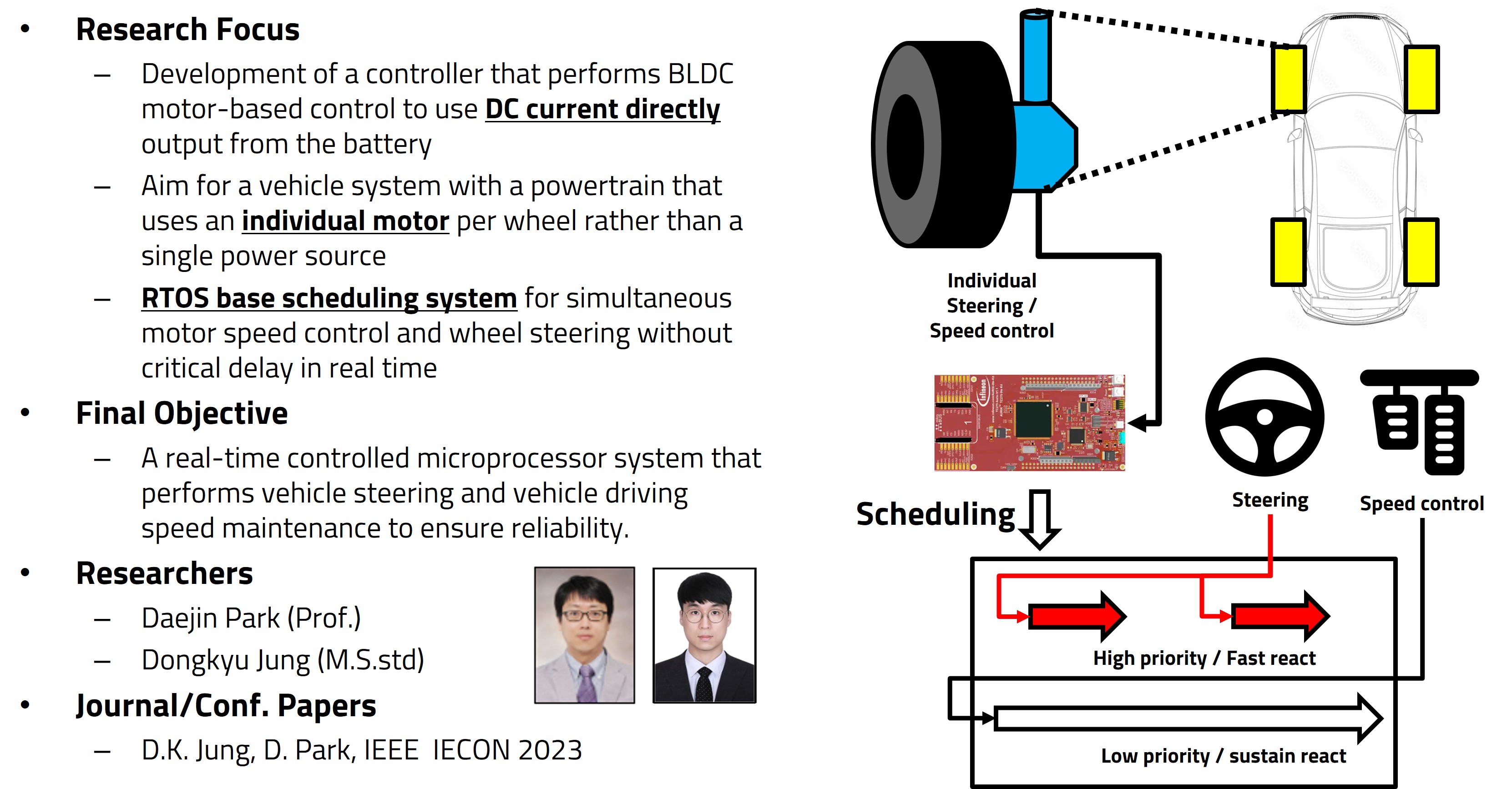
Real-Time Electronic Vehicle Steering and Motor Control Systems (RTEVSMCS)
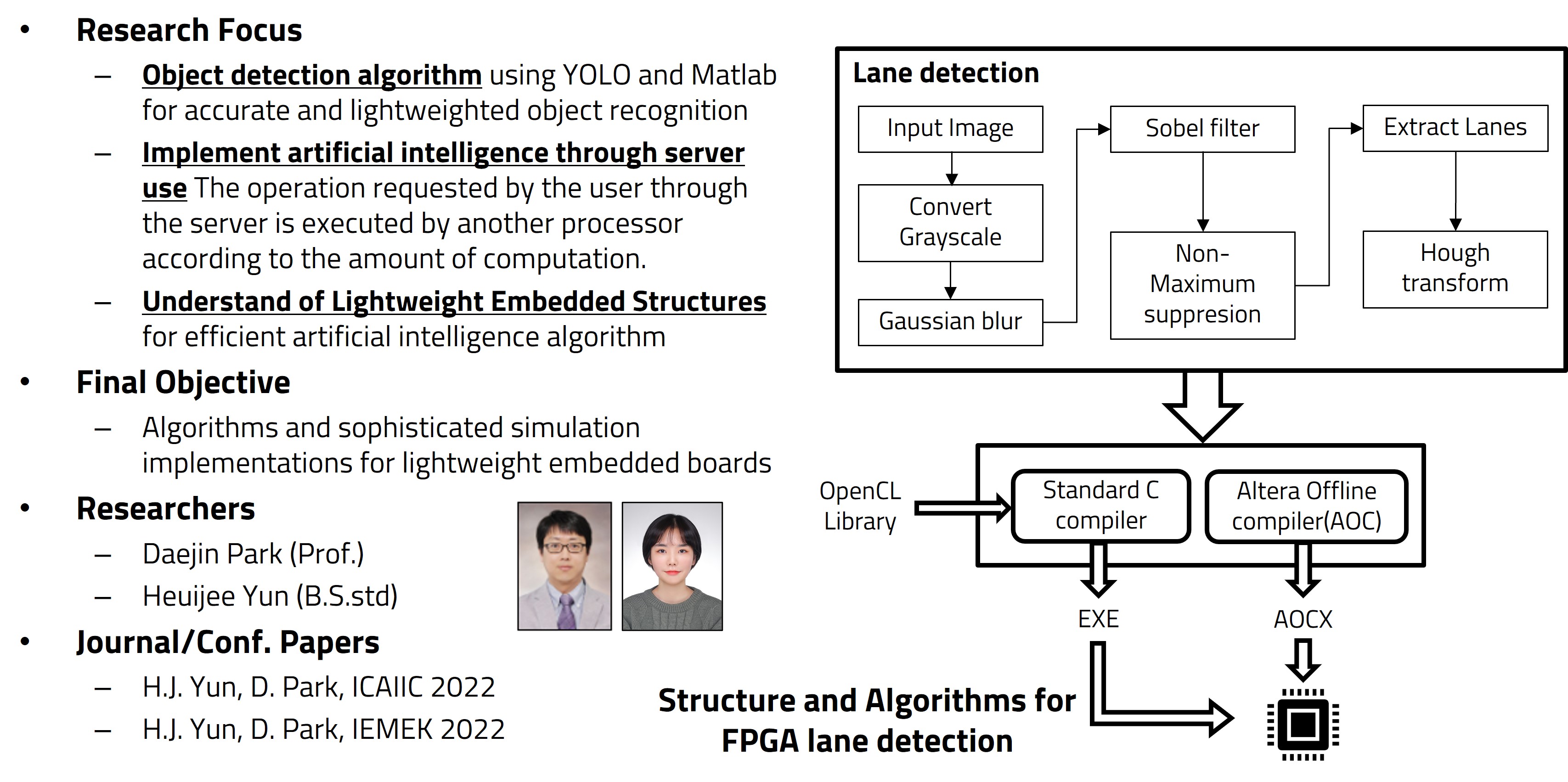
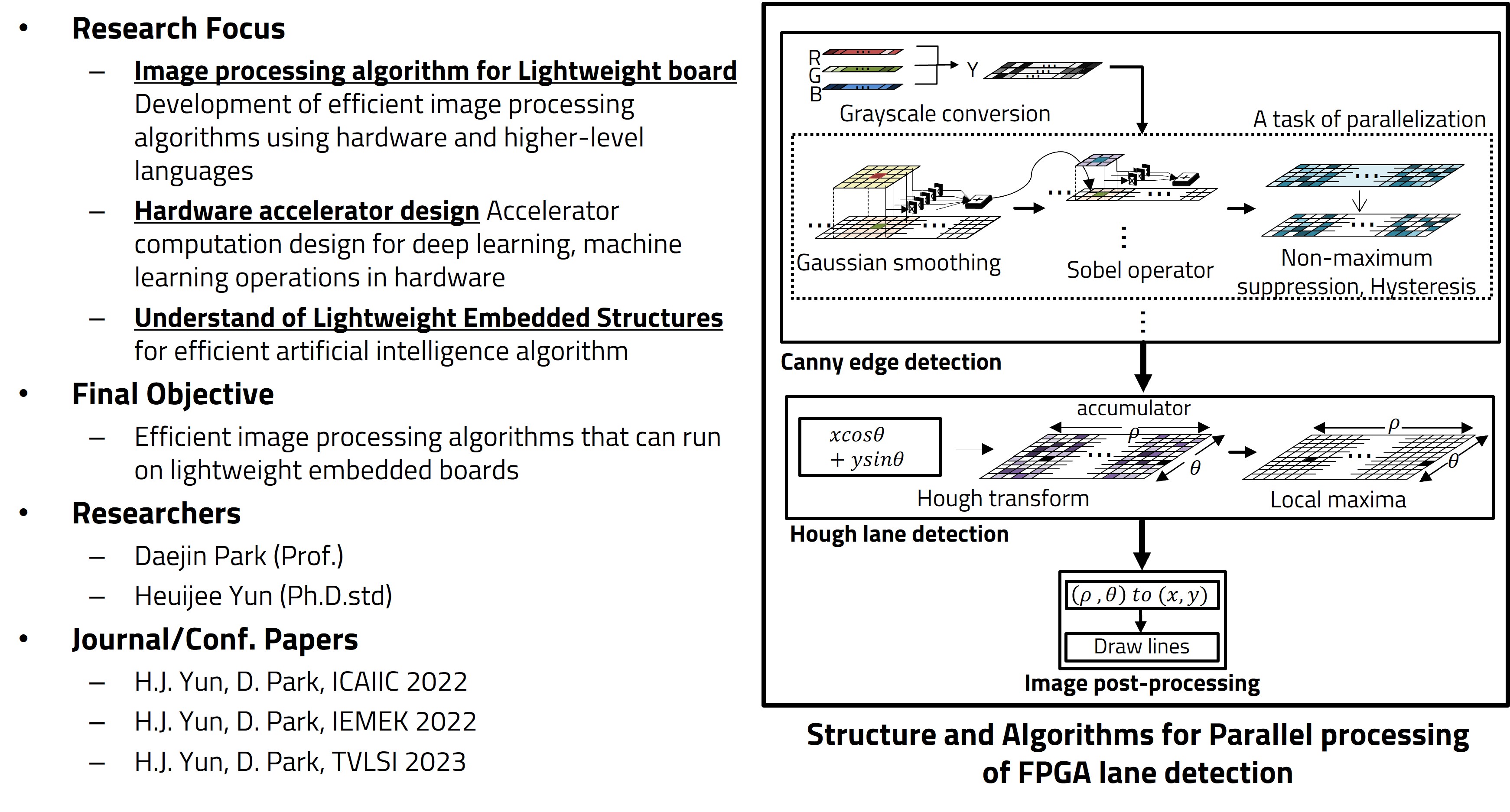
Accelerated Lane Detection Processor for Autonomous Driving (ALDPAD)
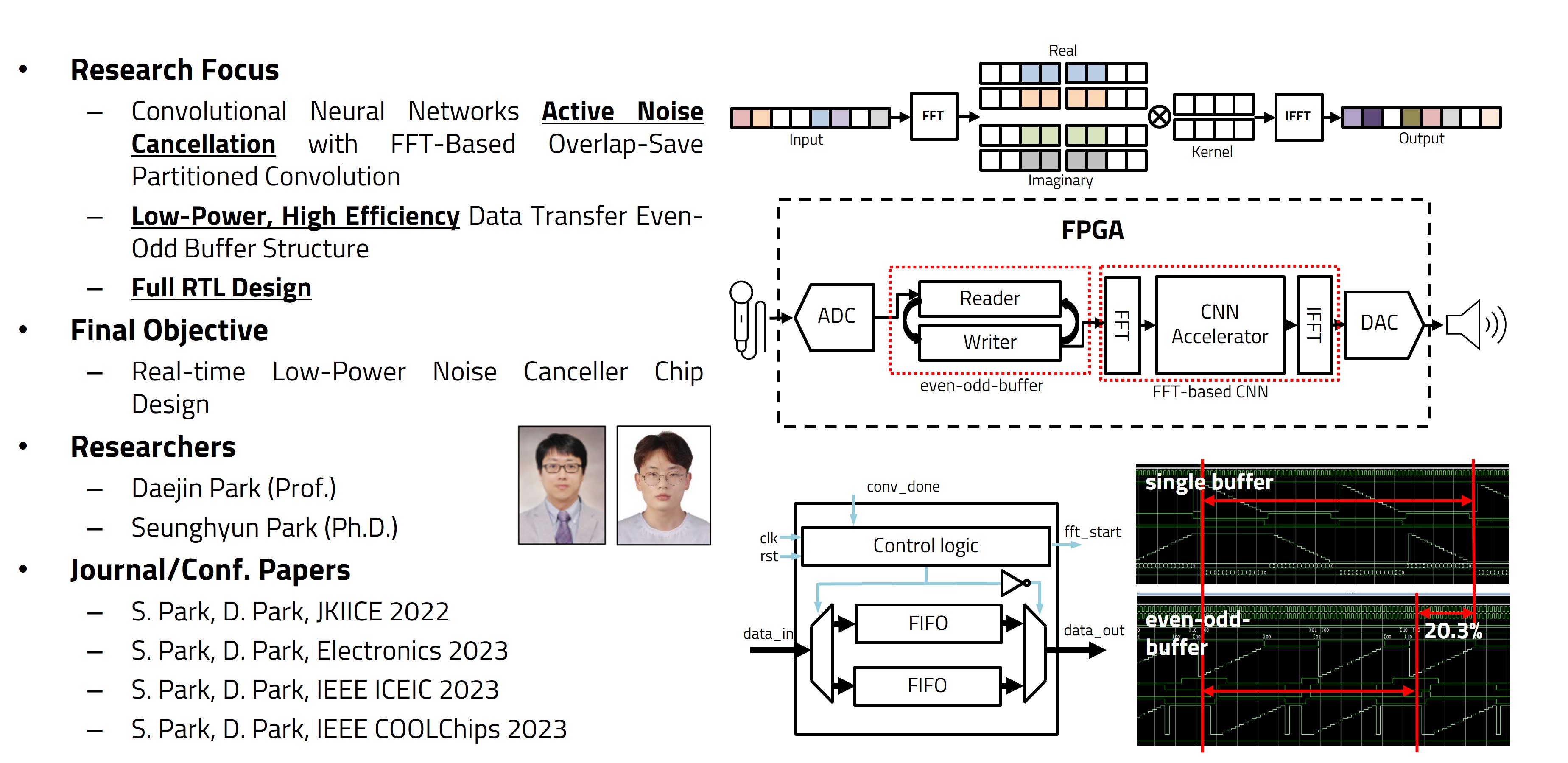
Convolutional Neural Networks Active Noise Cancellation (CNNANC)
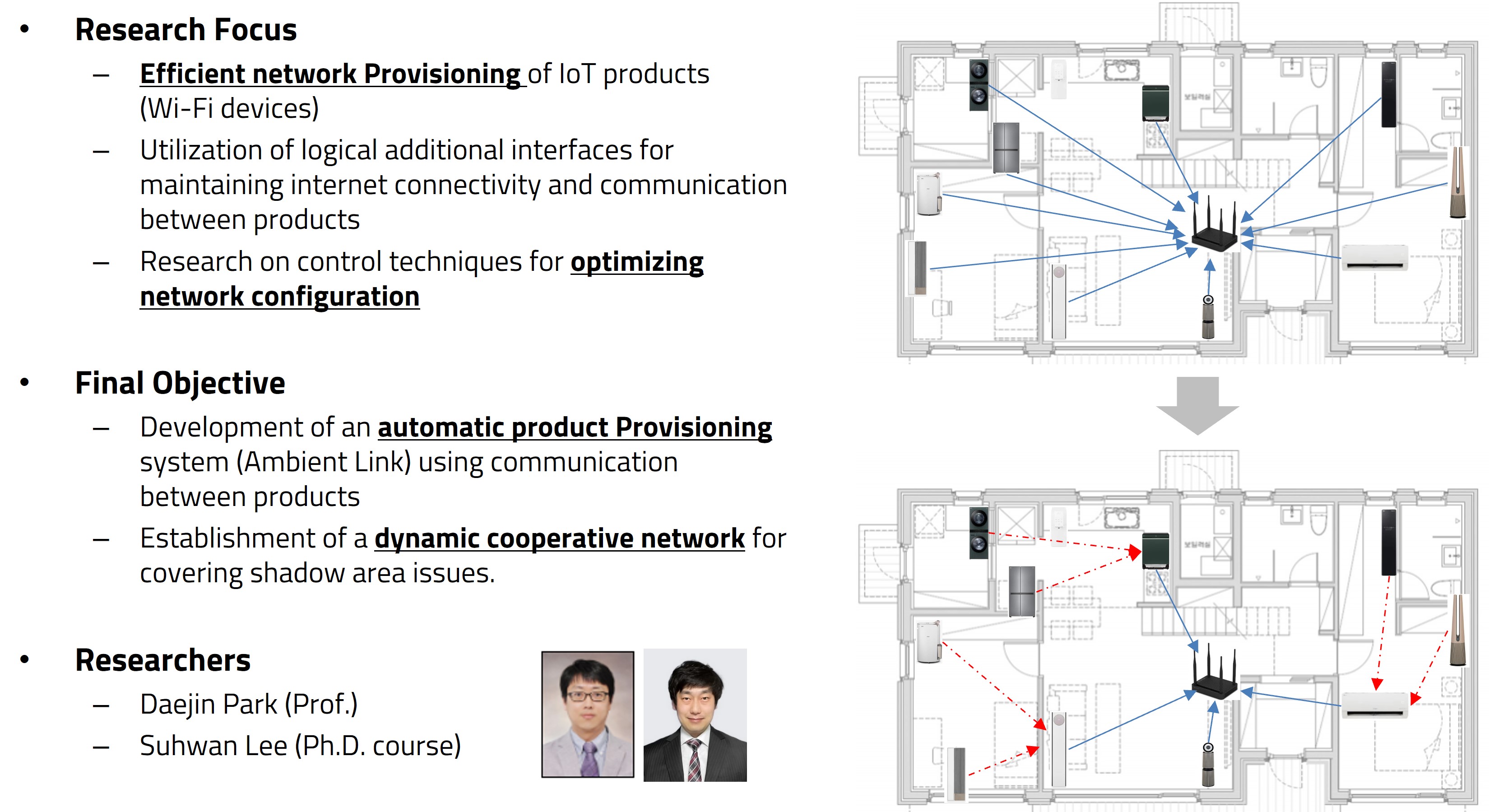
Ambient Network-based Enrollment and Link Management of IoT Product (AmbientLink)
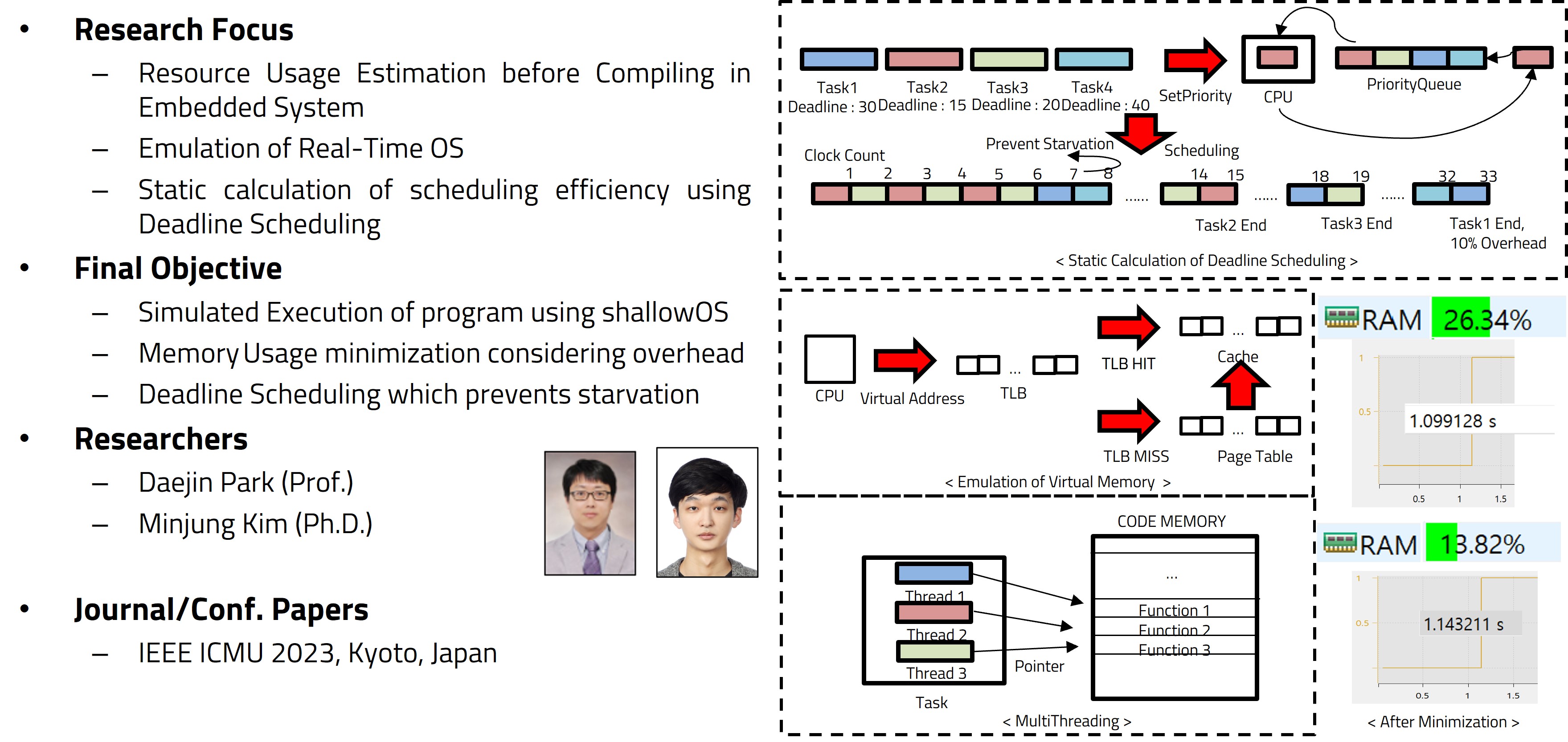
On-Chip Embedded Software Execution using Pre-Emulation on Shallow OS (ShallowOS)
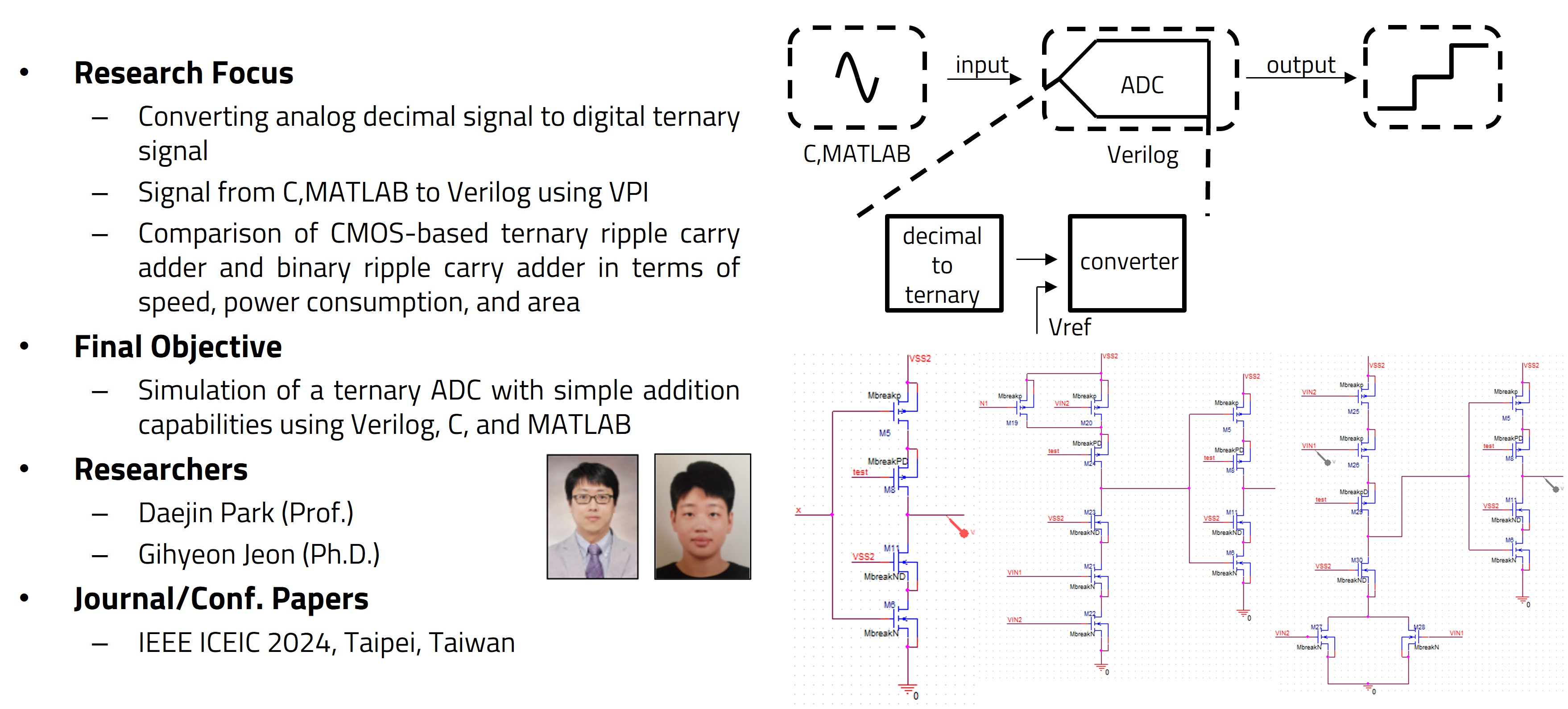
Ternary ADC with CMOS Ternary Ripple Carry Adder (TRCA)
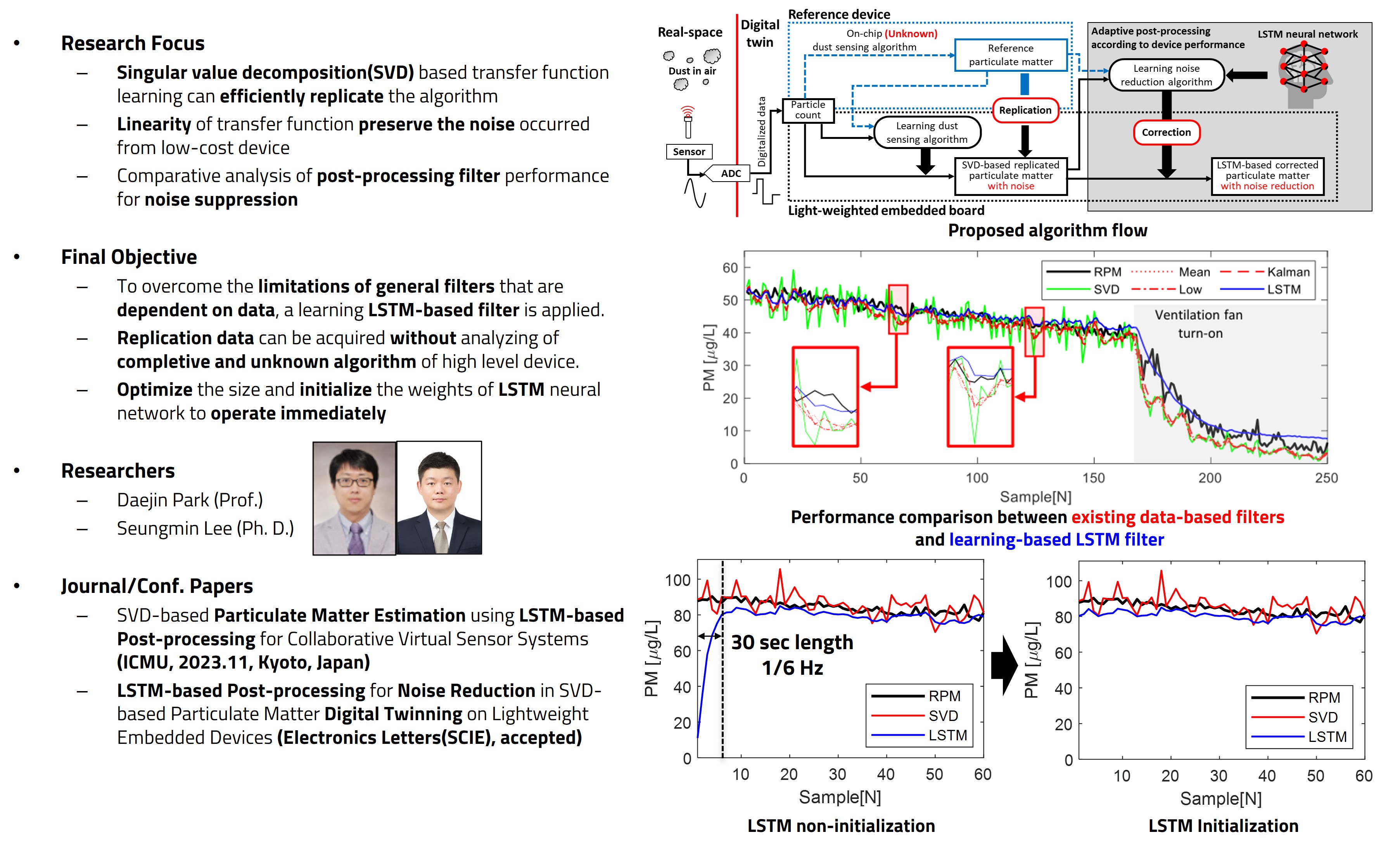
LSTM-based Noise Suppression (LSTMNS)
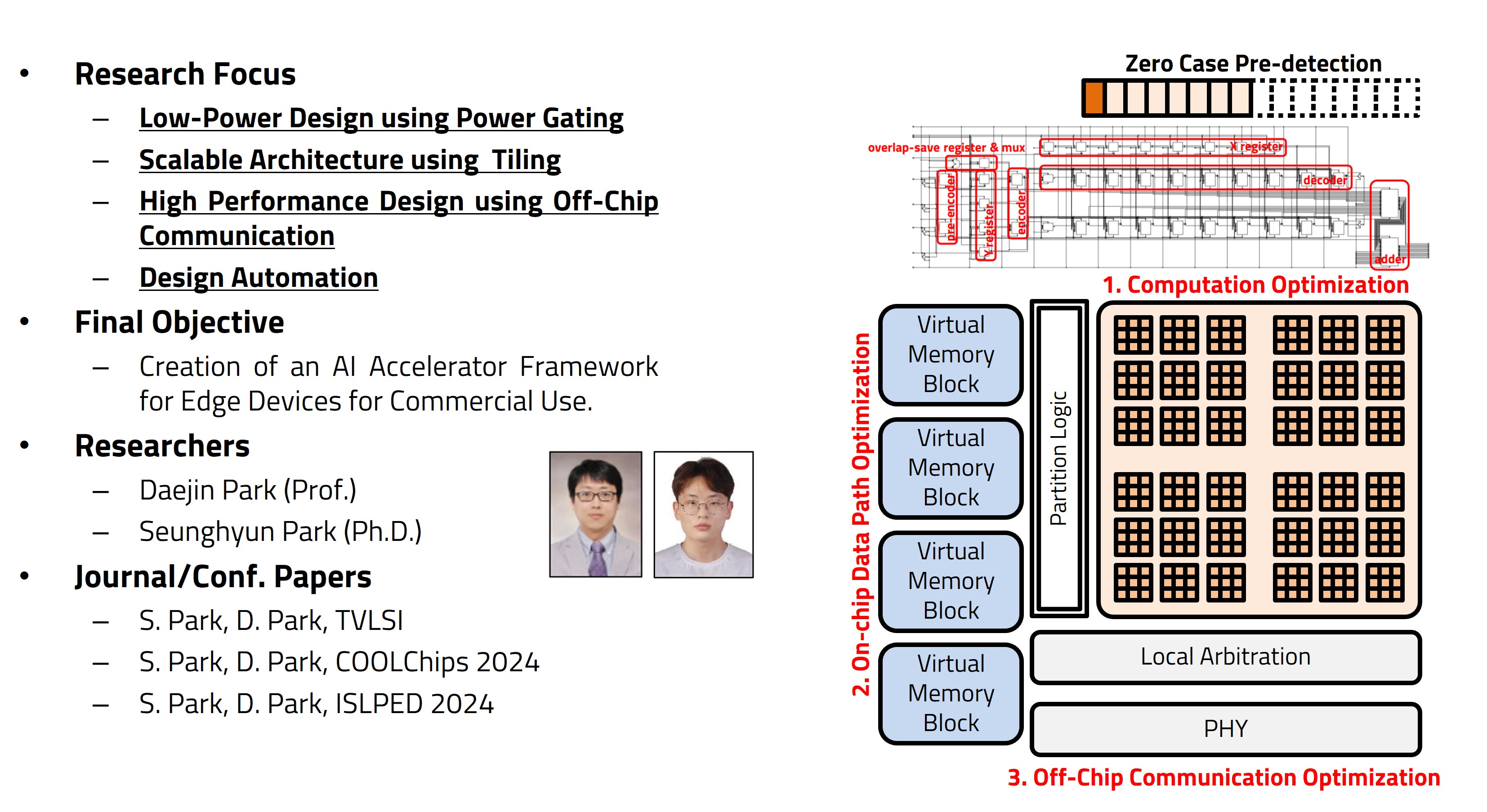
Low-power, Low-cost, and Low-latency Accelerator (3L-ACC)
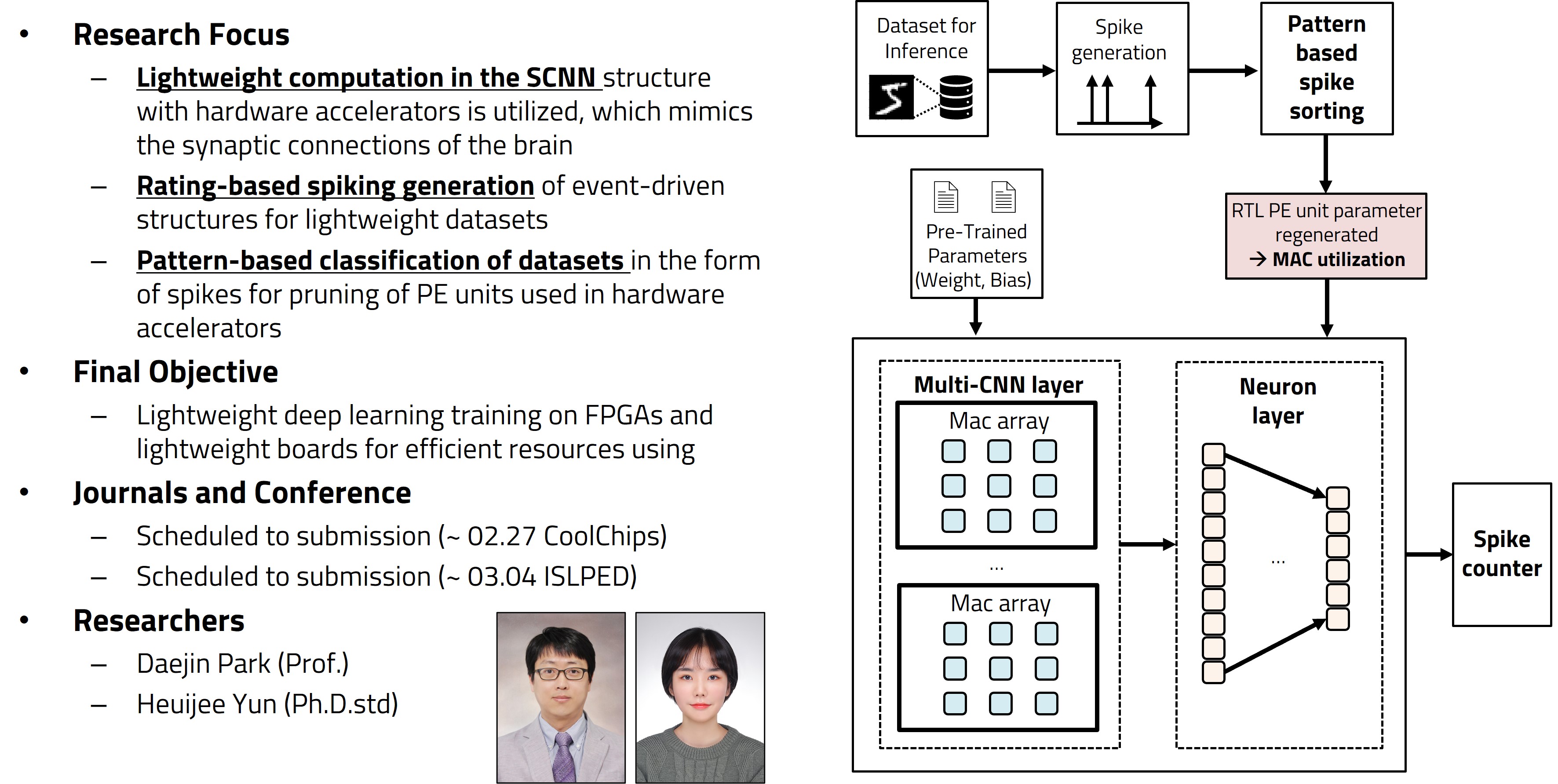
Event-Driven Pattern Sorted CSNN (EPSCNN)
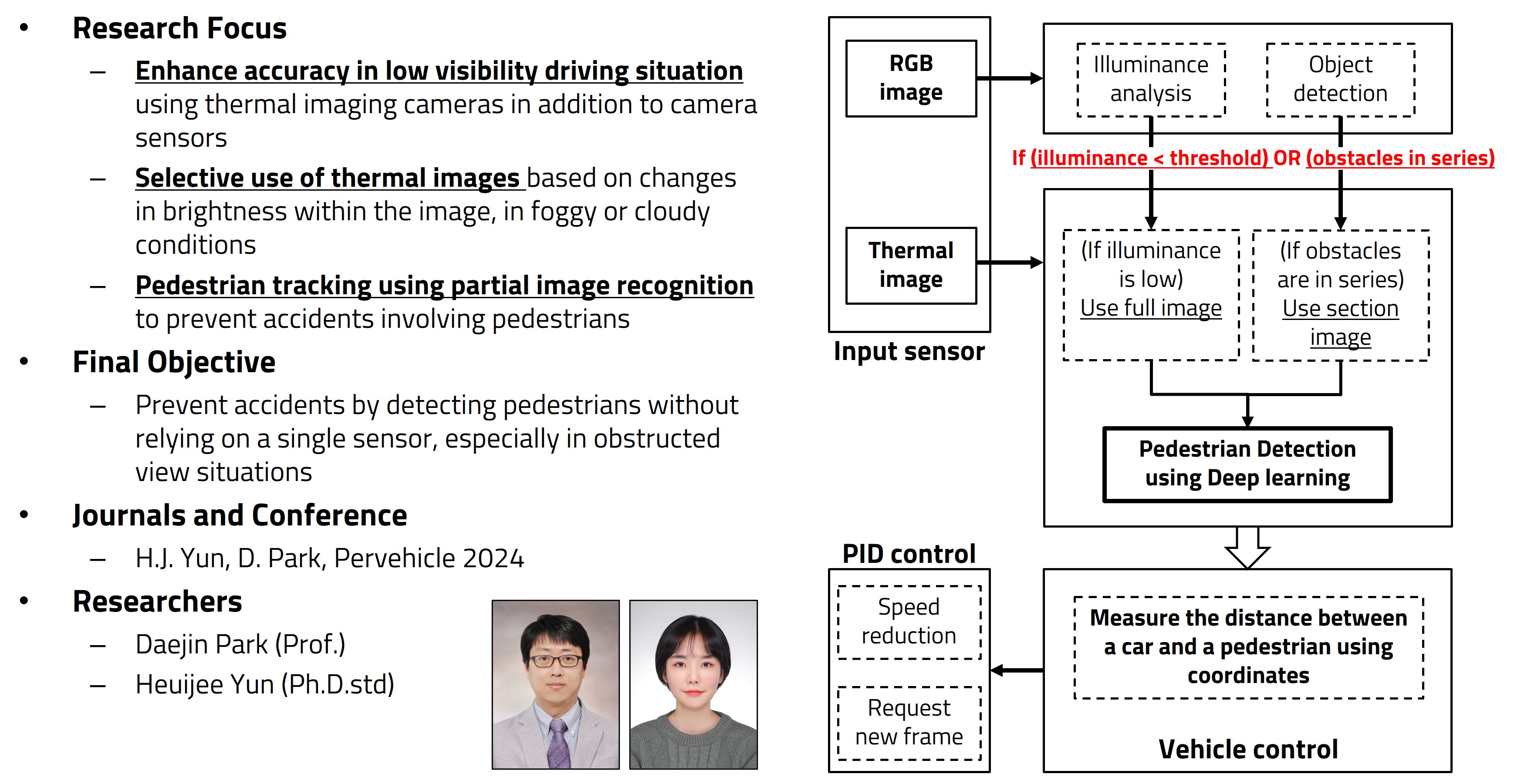
DL based Human Detection using Thermal-RGB Data Fusion for ADAS (HDTRGB)
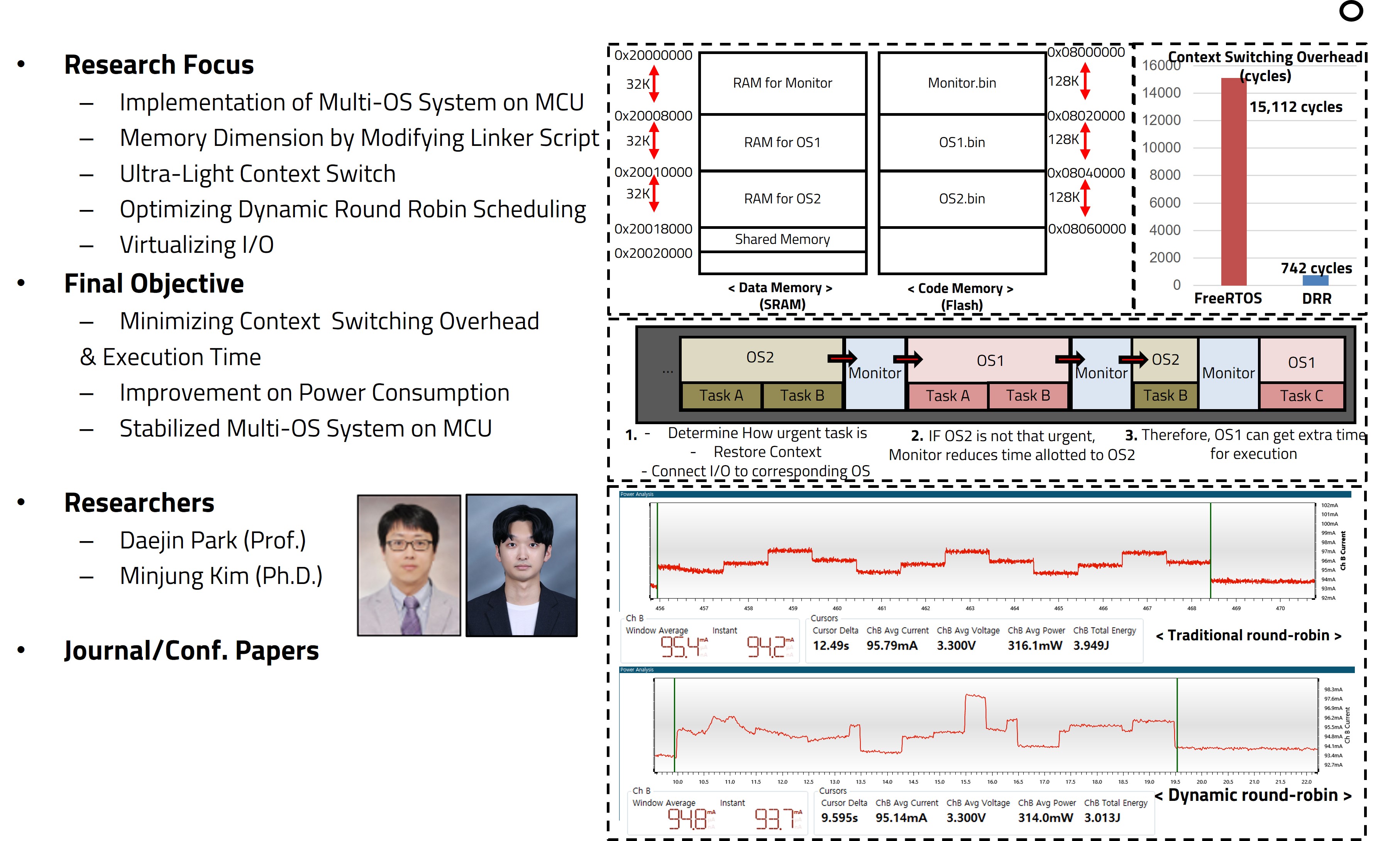
Dynamic Round Robin Scheduling on Bare-Metal Shallow Multi-OS (DRRS)
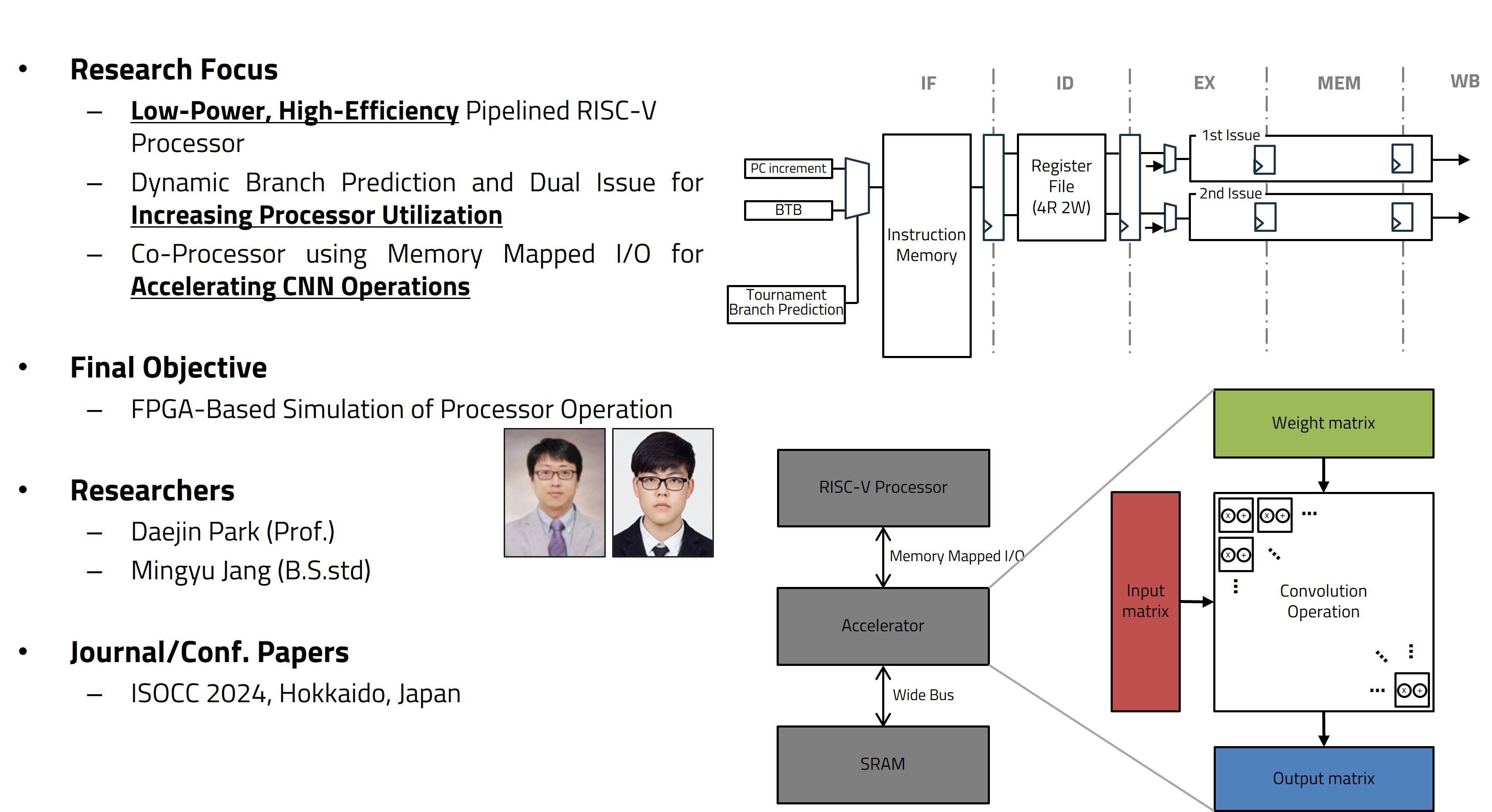
FPGA Implementation of CNN Accelerated RISC-V Co-Processor (CNNRISCV)
Low-Power Accelerator Virtualization for Heterogeneous AI-CPP-Accelerator (LPAV)
Multi-Camera Interoperable Emulation Framework for Autonomous Vehicle Driving (MCIEF)
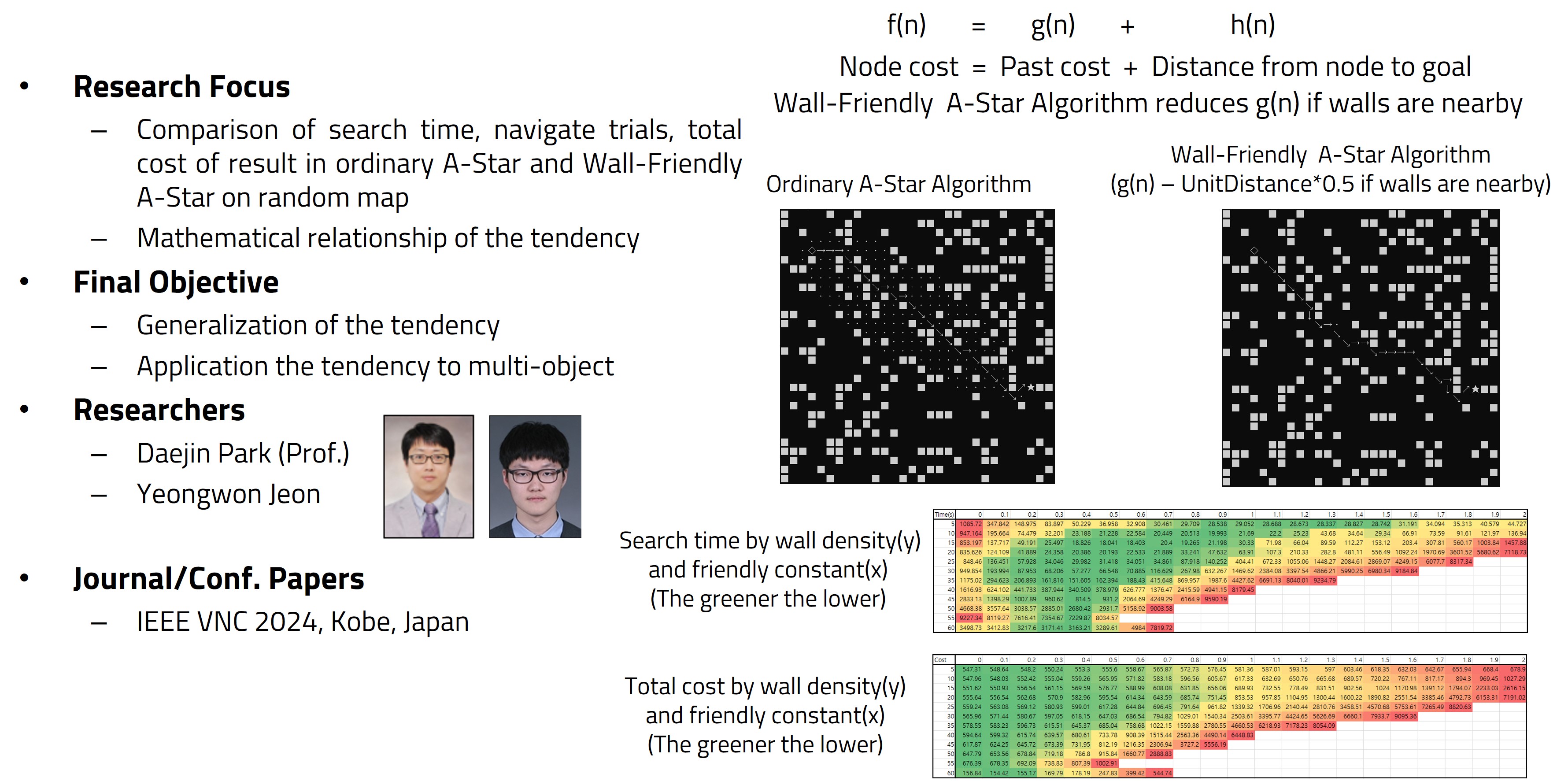
Obstacle-Aware Adaptive A-Star Algorithm for Search Time Reduction (ASTAR)
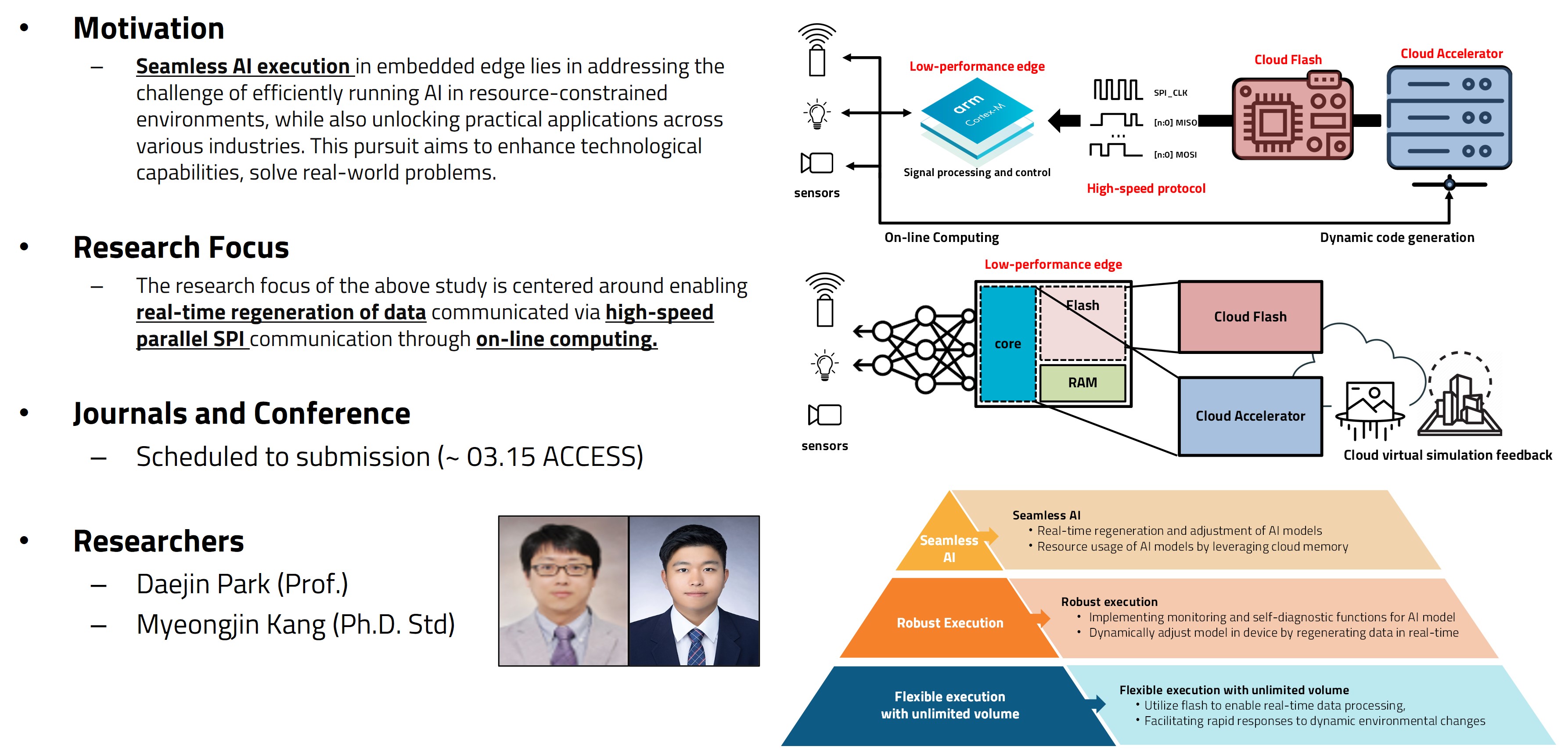
Cloud-Edge Connected Online Computing for Seamless Edge AI Services (OCSEA)
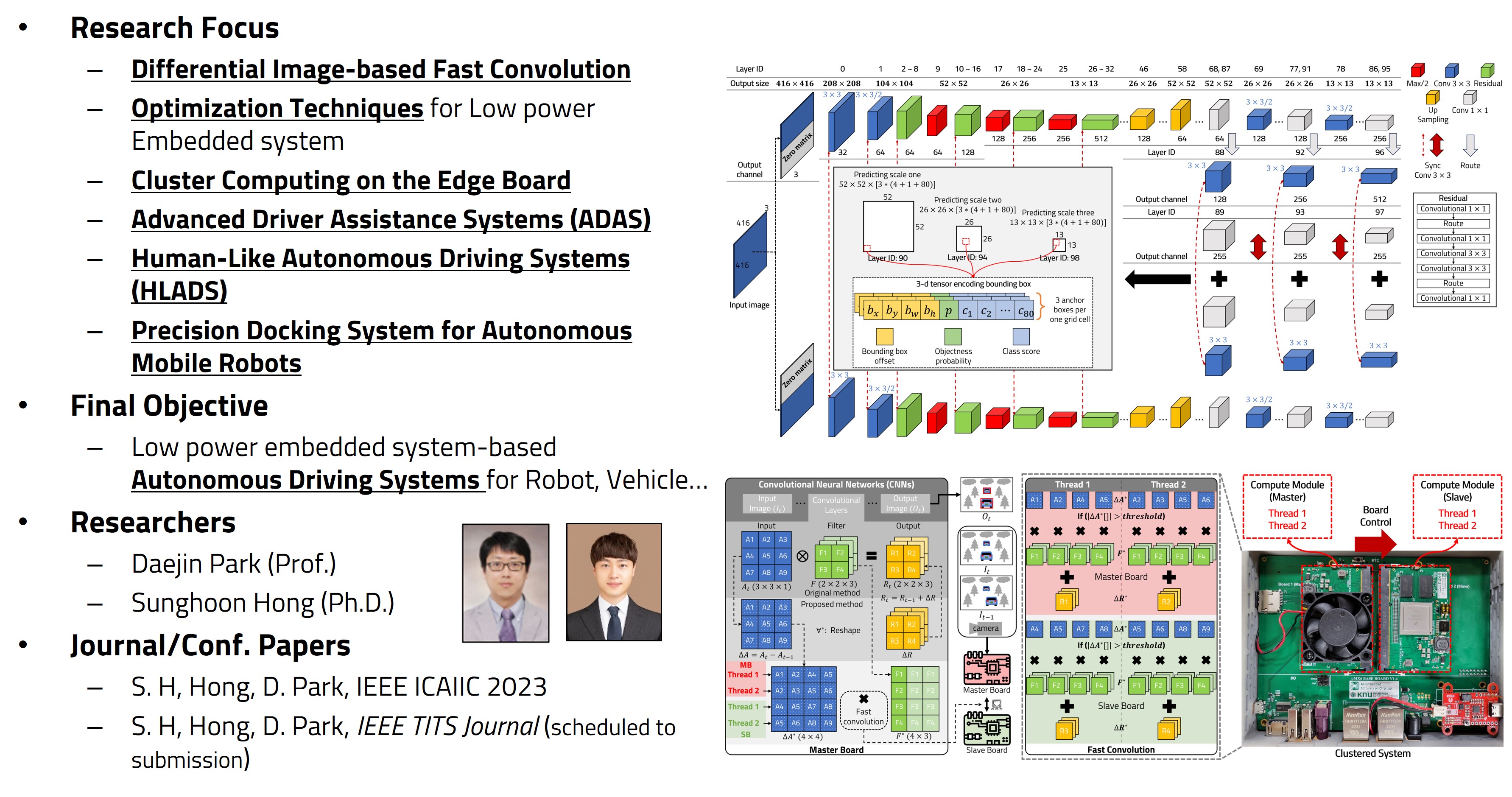
Differential Image-based Scalable YOLOv7-Tiny Implementation for Clustered Embedded Systems (DISYTI)
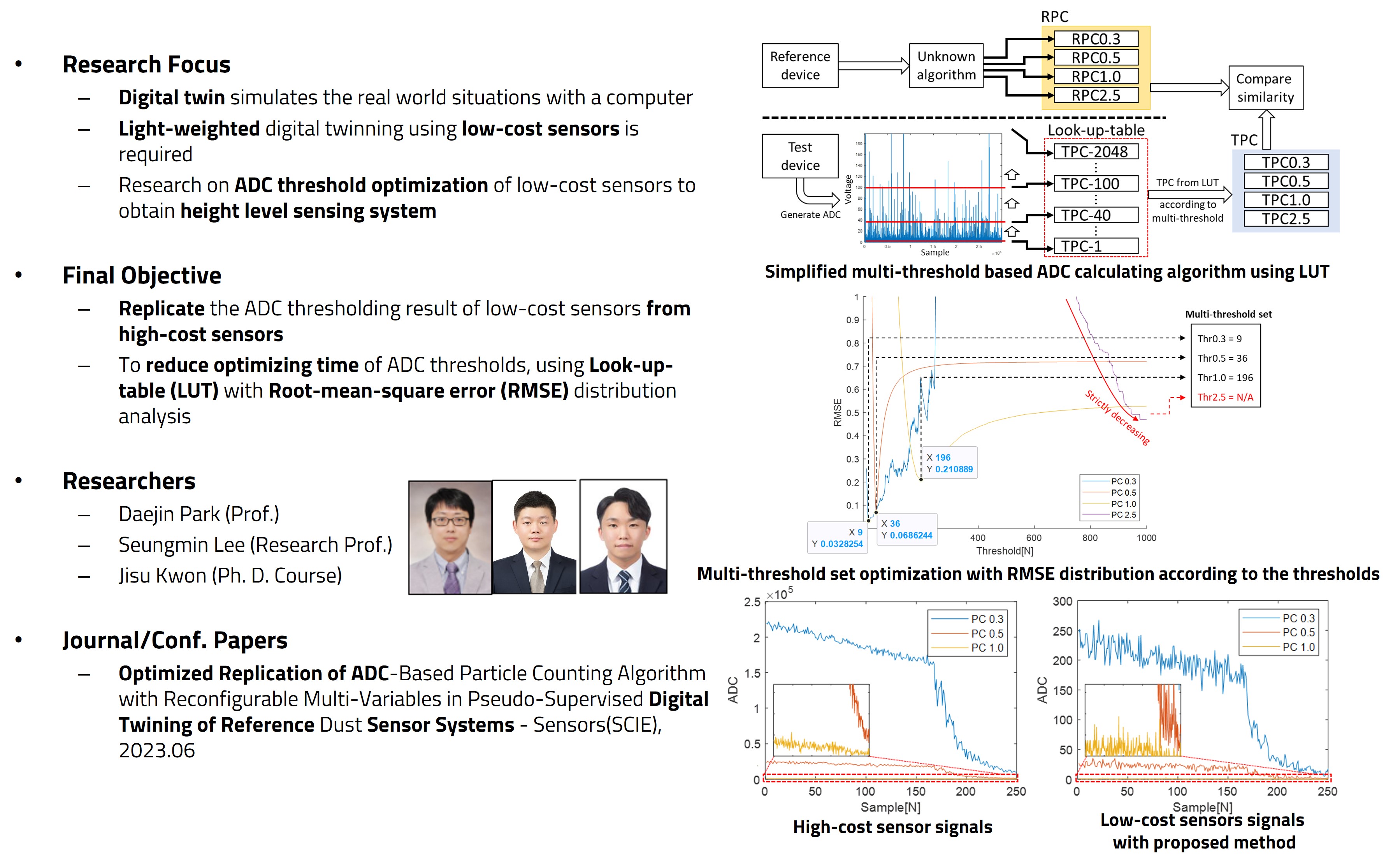
Digital Twin-based ADC Threshold Optimization
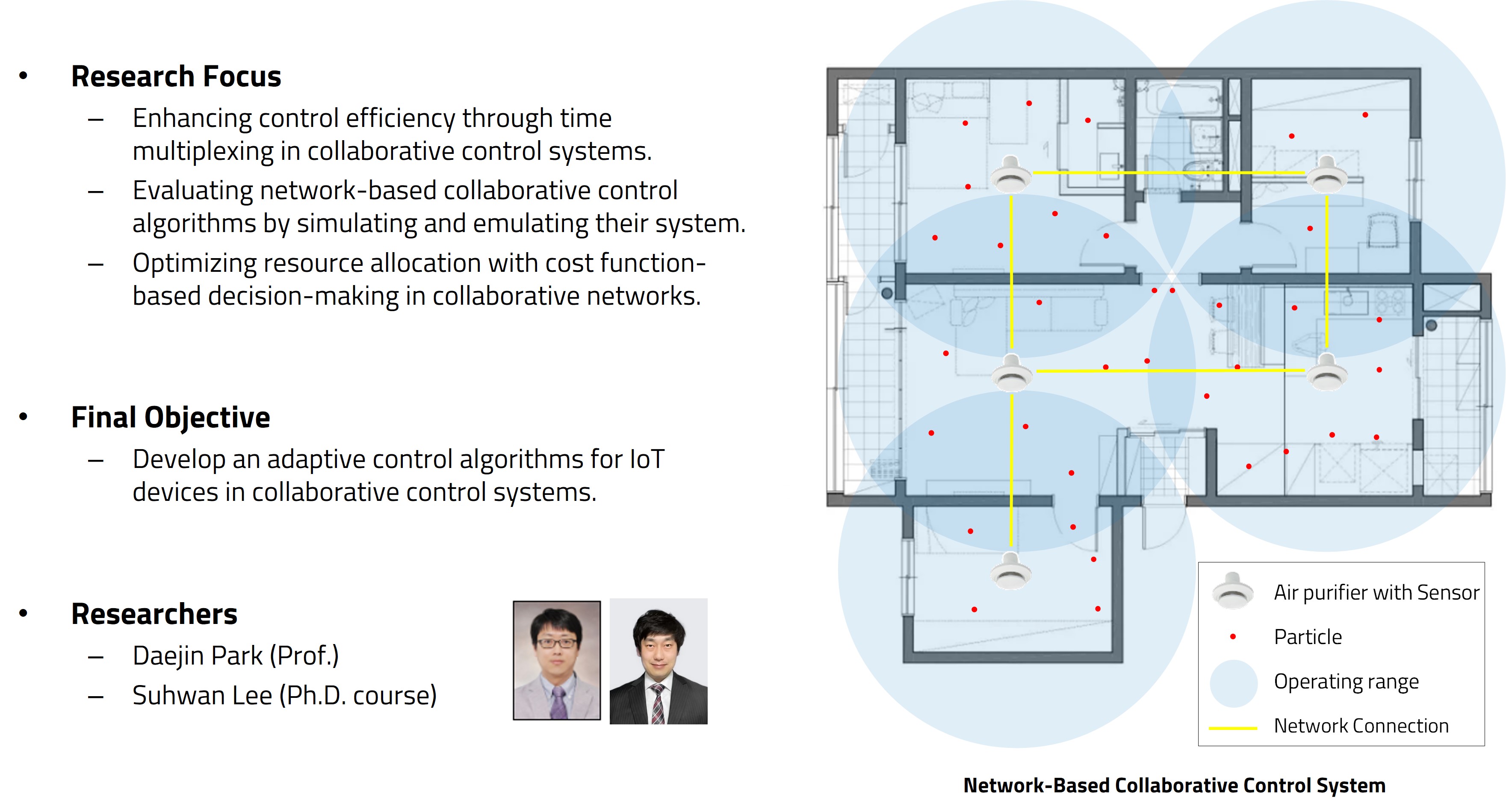
Network-based Structured Aware Collaborative Control
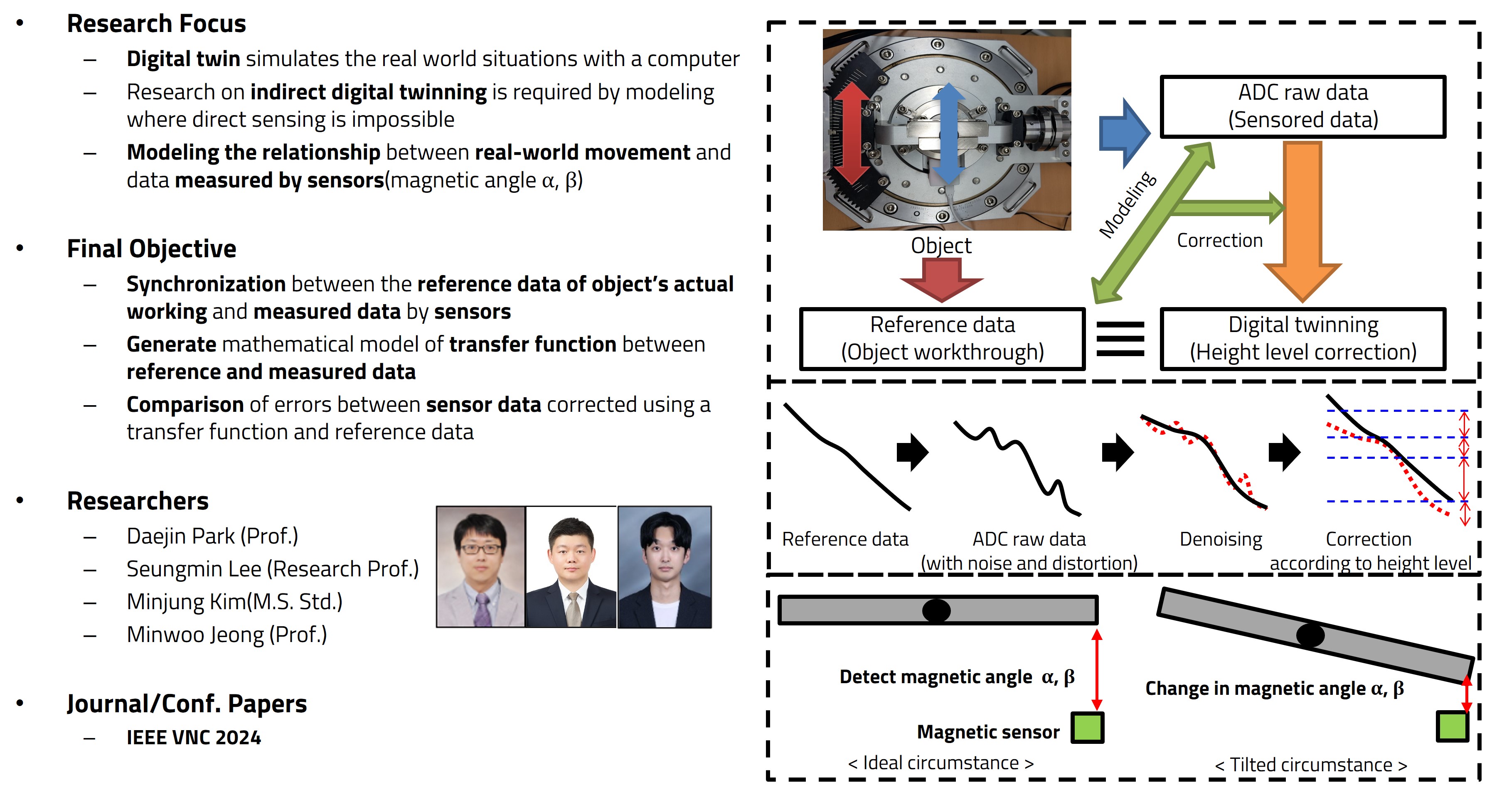
Digital Twin-based Height Level Sensor for Safe Automotive Control
Bit-Separable Multiplier for CNN Accelerator (BSM)
Digital Twin-based Human-Things Interaction Simulation (DTSim)
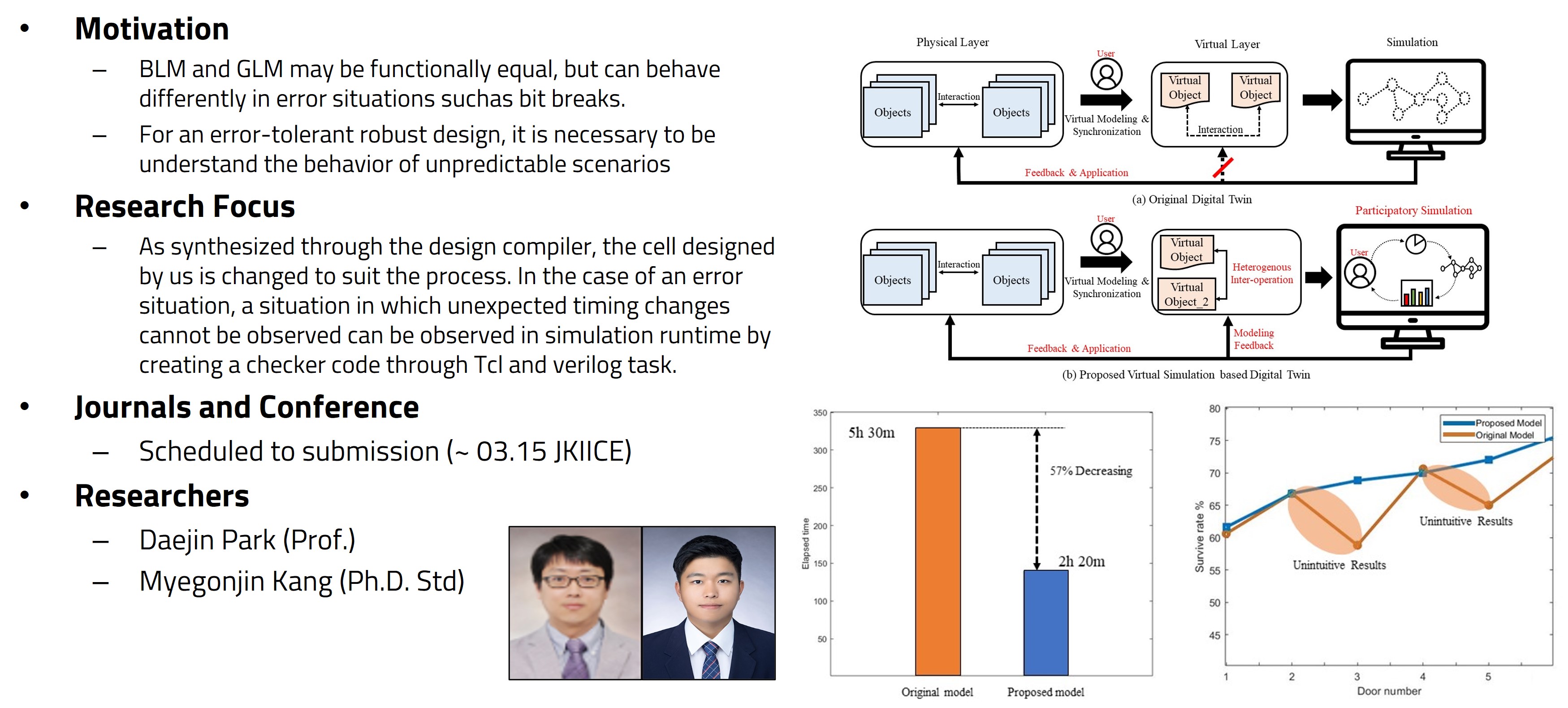
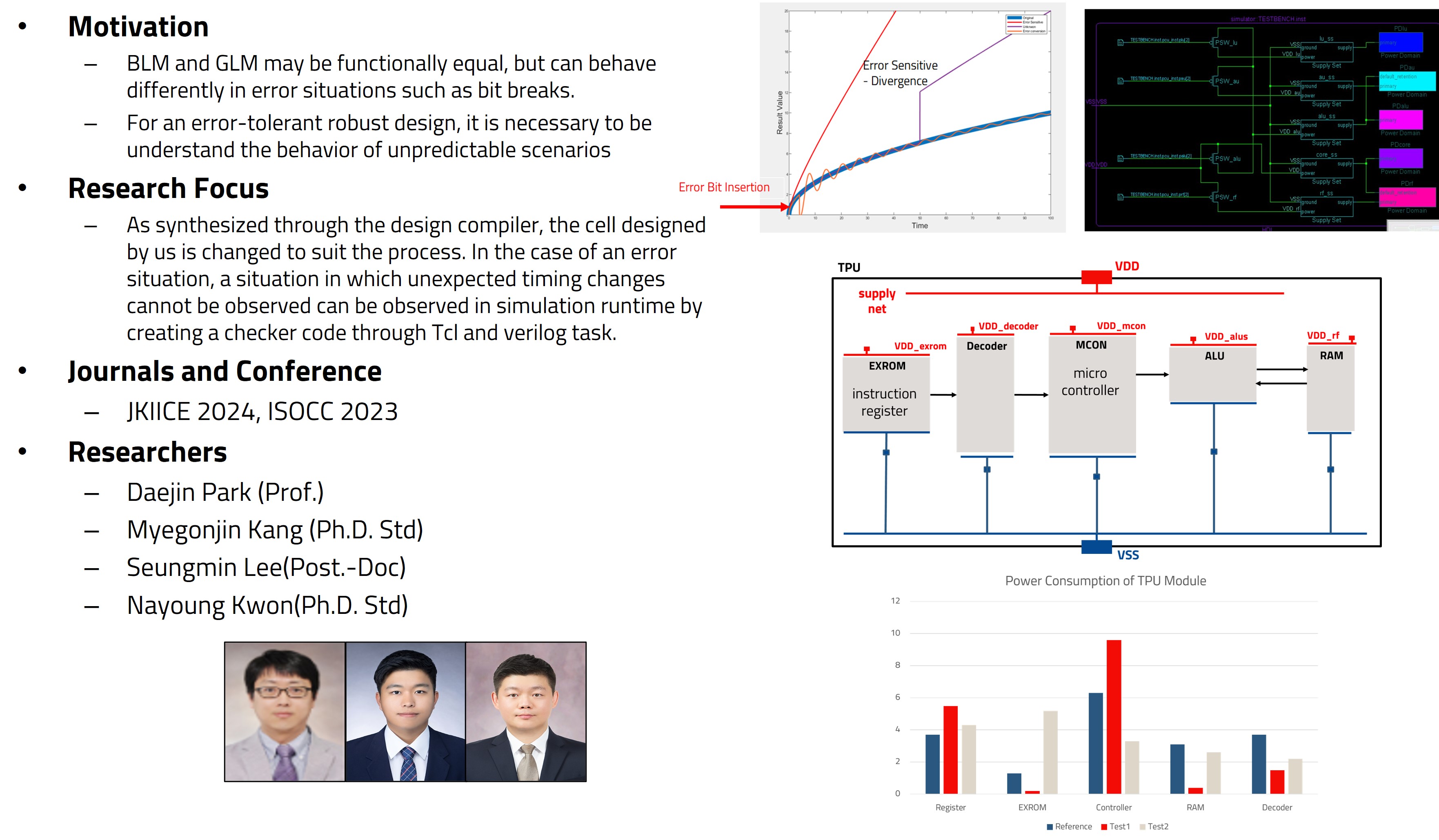
Robustness Checking by Unpredictable Condition Simulation in Runtime (RSimCheck)
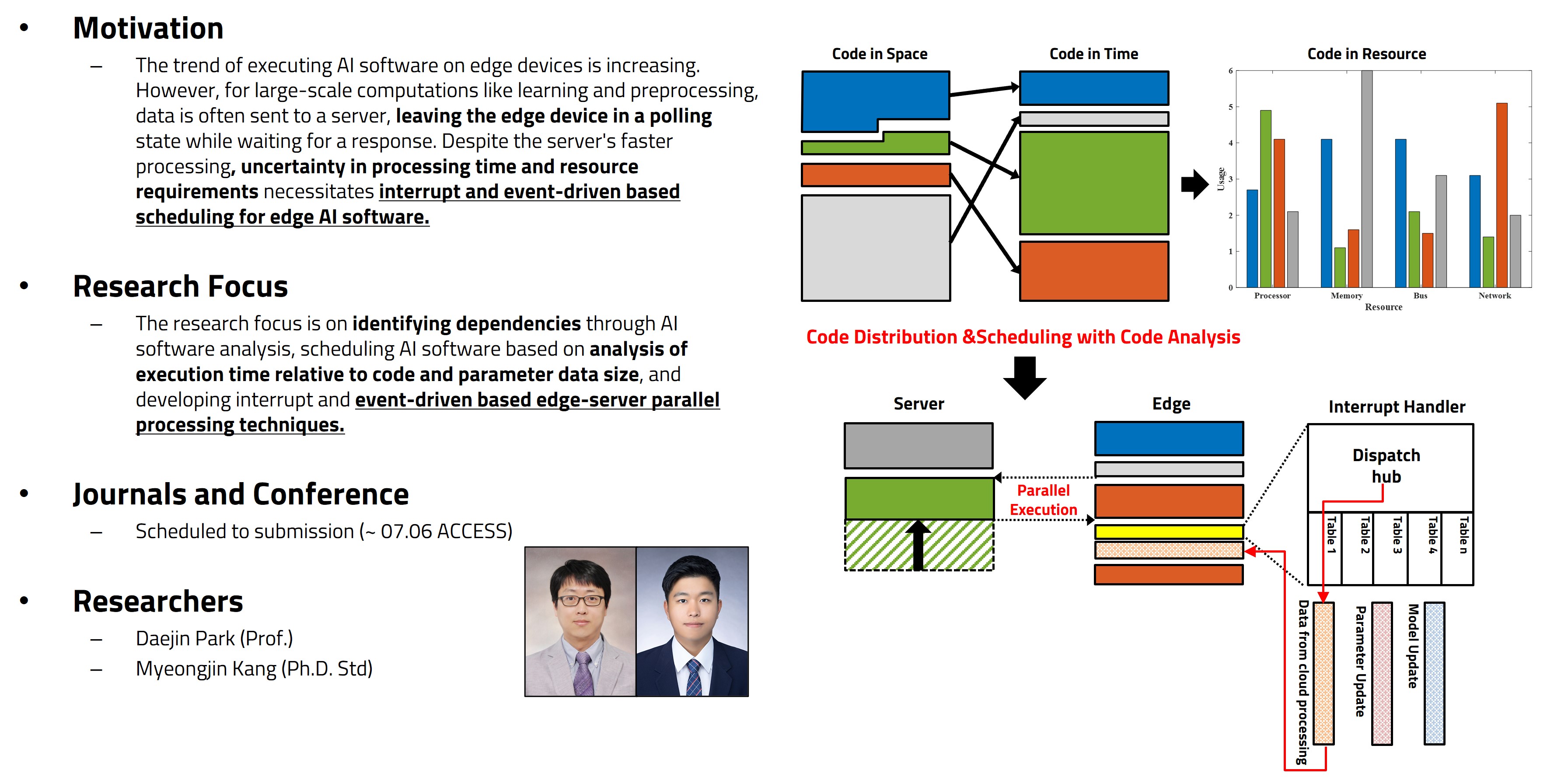
Event-Driven Edge AI Software Offloading Scheduling (EVEAISW)
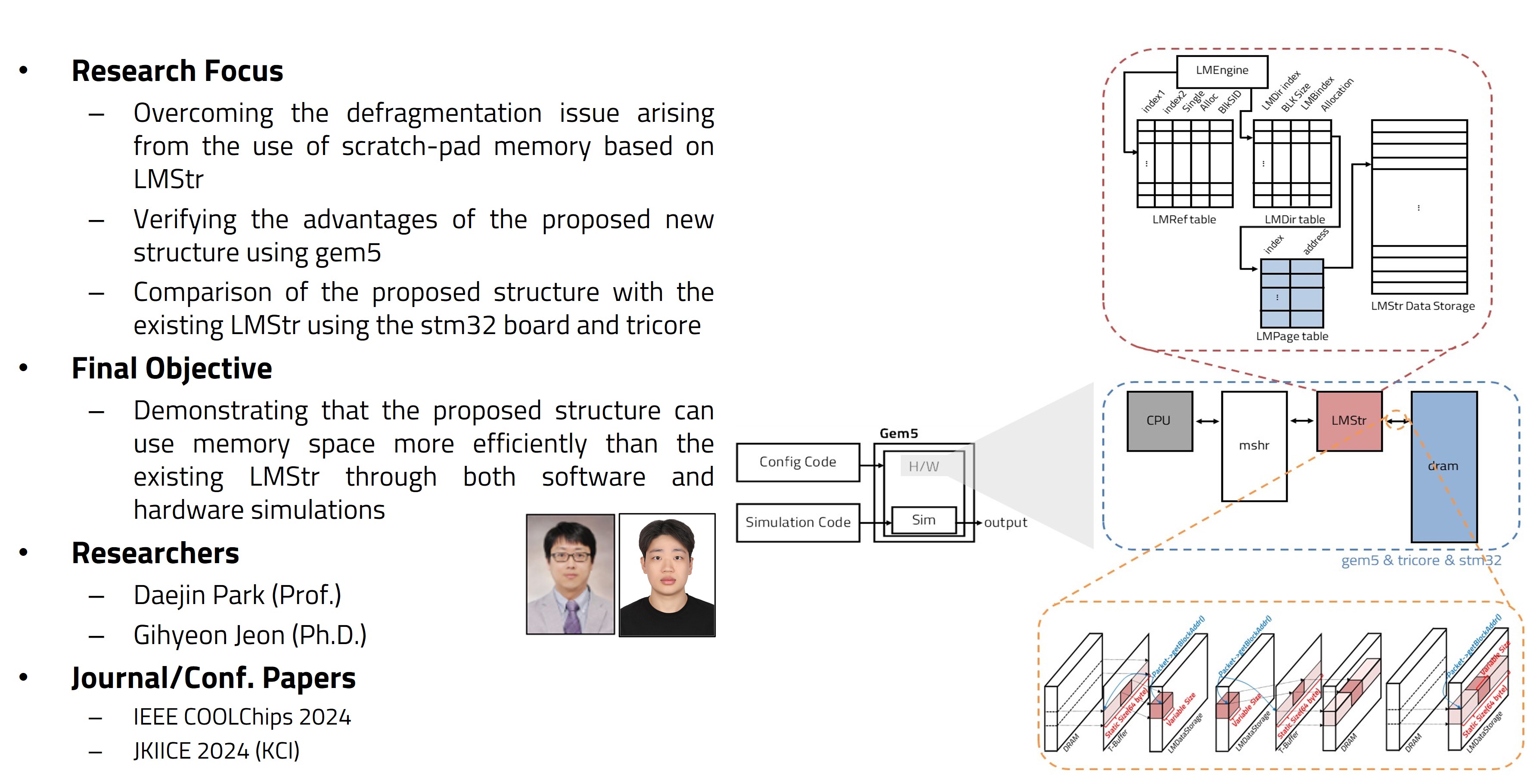
Defragmentation-based Efficient Allocation on Scratch-Pad Memory
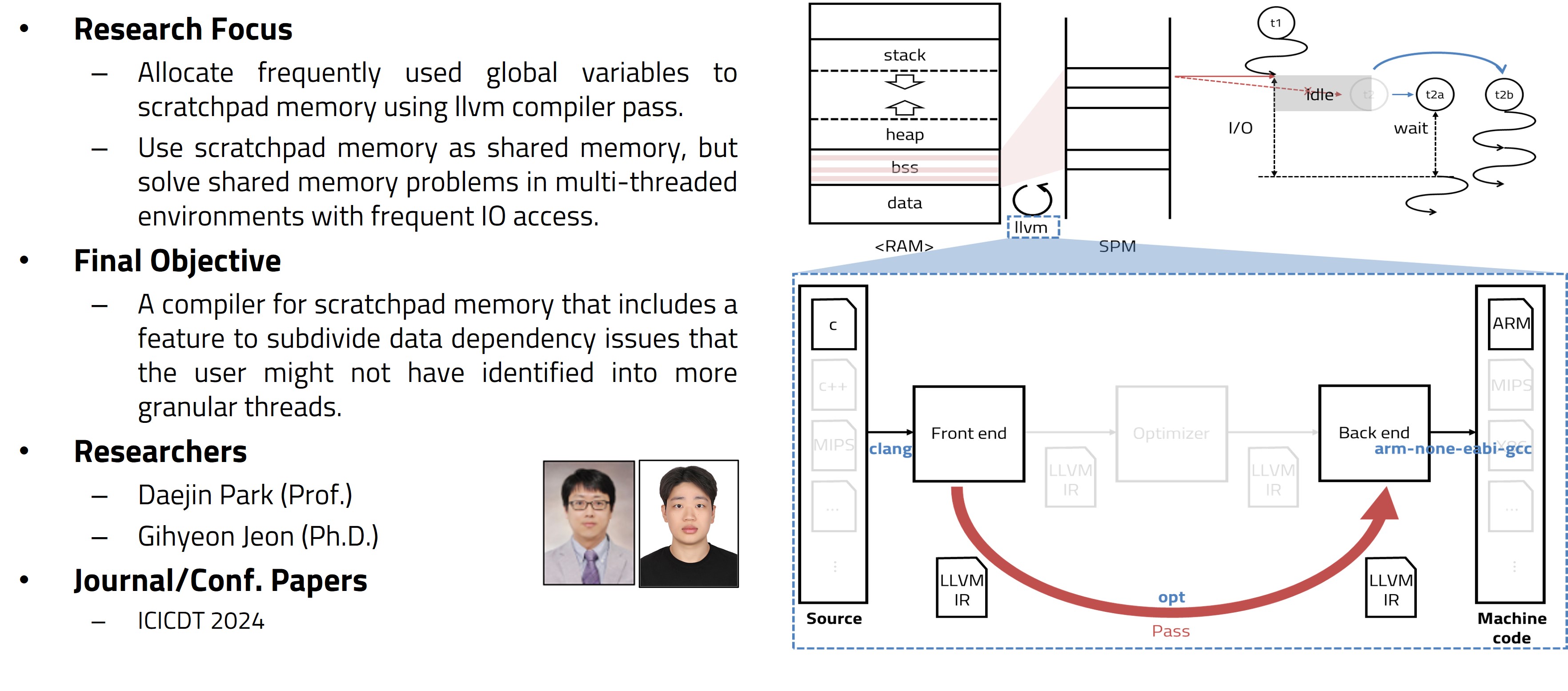
Compiler-Assisted Multithreaded SPM Management
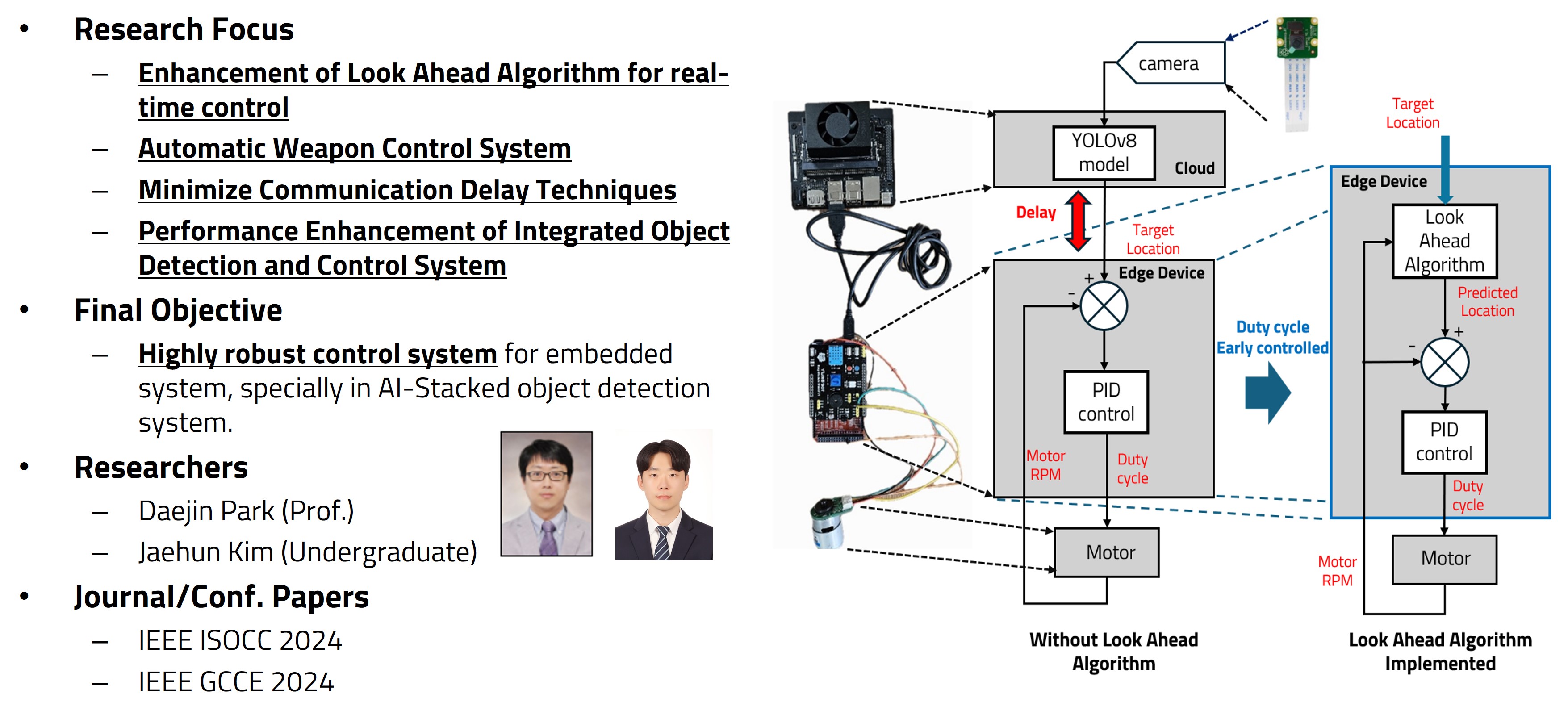
YOLOv8 Automatic Weapon Control with Look-Ahead Movement Estimator
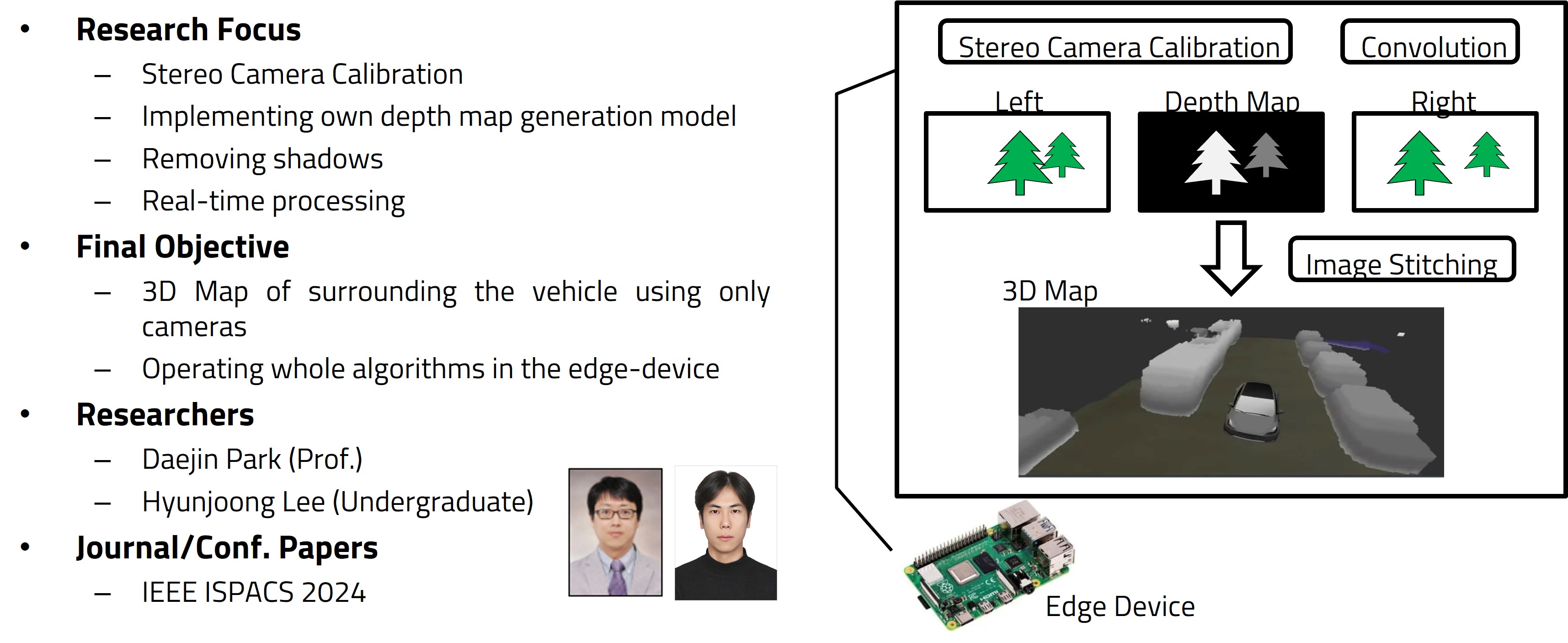
3D Mapping based on Depth Map using Stereo Vision
This page was generated by our compiler @ copyright reserved (AI-S2oC Lab)